В некоторых системах идентификации в качестве ключа используется глаз человека. Существует две разновидности этих систем, использующие разные идентификаторы. В первом случае в качестве «носителя» идентификационного кода применяется рисунок капилляров (кровеносных сосудов) на сетчатке (дне) глаза, а во втором — узор радужной оболочки глаза.
Для начала рассмотрим способ идентификации по узору кровеносных сосудов, расположенных на поверхности глазного дна (сетчатке). Сетчатка расположена глубоко внутри глаза, но это не останавливает современные технологии. Более того, именно благодаря этому свойству, сетчатка - один из наиболее стабильных физиологических признаков организма. Сканирование сетчатки происходит с использованием инфракрасного света низкой интенсивности, направленного через зрачок к кровеносным сосудам на задней стенке глаза. Для этих целей используется лазерный луч мягкого излучения. Вены и артерии, снабжающие глаз кровью, хорошо видны при подсветке глазного дна внешним источником света. Еще в 1935 году Саймон и Голдштейн доказали уникальность дерева кровеносных сосудов глазного дна для каждого конкретного индивидуума.
Сканеры для сетчатки глаза получили большое распространение в сверхсекретных системах контроля доступа , так как у них один из самых низких процентов отказа доступа зарегистрированных пользователей. Кроме того, в системах предусмотрена защита от муляжа.
В настоящее время широкому распространению этого метода препятствует ряд причин:
высокая стоимость считывателя;
невысокая пропускная способность;
психологический фактор.
Невысокая пропускная способность связана с тем, что пользователь должен в течение нескольких секунд смотреть в окуляр на зеленую точку.
Примером такого устройства распознавания свойств сетчатки глаза может служить продукция EyeDentify"s. Она использует камеру с сенсорами, которые с короткого расстояния (менее 3 см) измеряют свойства сетчатки глаза. Пользователю достаточно взглянуть одним глазом в отверстие камеры ICAM 2001, и система принимает решение о праве доступа. Основные характеристики считывателя ICAM 2001:
время регистрации (enrolment) — менее 1 мин;
время распознавания при сравнении с базой эталонов в 1 500 человек — менее 5 с; средняя пропускная способность — 4—7 с.
И тем не менее, эти системы совершенствуются и находят свое применение. В США, например, разработана новая система проверки пассажиров, основанная на сканировании сетчатки глаза. Специалисты утверждают, что теперь для проверки не нужно доставать из кармана бумажник с документами, достаточно лишь пройти перед камерой. Исследования сетчатки основываются на анализе более 500 характеристик. После сканирования код будет сохраняться в базе данных вместе с другой информацией о пассажире, и в последующем идентификация личности будет занимать всего несколько секунд. Использование подобной системы будет абсолютно добровольной процедурой для пассажиров.
Английская Национальная физическая лаборатория (National Physical Laboratory, NPL), по заказу организации Communications Electronics Security Group, специализирующейся на электронных средствах защиты систем связи, провела исследования различных биометрических технологий идентификации пользователей.
В ходе испытаний система распознавания пользователя по сетчатке глаза не разрешила допуск ни одному из более чем 2,7 млн «посторонних», а среди тех, кто имел права доступа, лишь 1,8% были ошибочно отвергнуты системой (проводилось три попытки доступа). Как сообщается, это был самый низкий коэффициент ошибочных решений среди проверяемых систем биометрической идентификации. А самый большой процент ошибок был у системы распознавания лица — в разных сериях испытаний она отвергла от 10до 25% законных пользователей.
Еще одним уникальным для каждой личности статическим идентификатором является радужная оболочка  глаза. Уникальность рисунка радужной оболочки обусловлена генотипом личности, и существенные отличия радужной оболочки наблюдаются даже у близнецов. Врачи используют рисунок и цвет радужной оболочки для диагностики заболеваний и выявления генетической предрасположенности к некоторым заболеваниям. Обнаружено, что при ряде заболеваний на радужной оболочке появляются характерные пигментные пятна и изменения цвета. Для ослабления влияния состояния здоровья на результаты идентификации личности в технических системах опознавания используются только черно-белые изображения высокого разрешения.
глаза. Уникальность рисунка радужной оболочки обусловлена генотипом личности, и существенные отличия радужной оболочки наблюдаются даже у близнецов. Врачи используют рисунок и цвет радужной оболочки для диагностики заболеваний и выявления генетической предрасположенности к некоторым заболеваниям. Обнаружено, что при ряде заболеваний на радужной оболочке появляются характерные пигментные пятна и изменения цвета. Для ослабления влияния состояния здоровья на результаты идентификации личности в технических системах опознавания используются только черно-белые изображения высокого разрешения.
Идея распознавания на основе параметров радужной оболочки глаза появилась еще в 1950-х годах. Джон Даугман, профессор Кембриджского университета, изобрел технологию, в состав которой входила система распознавания по радужной оболочке, используемая сейчас в Nationwide ATM. В то время ученые доказали, что не существует двух человек с одинаковой радужной оболочкой глаза (более того, даже у одного человека радужные оболочки глаз отличаются), но программного обеспечения, способного выполнять поиск и устанавливать соответствие образцов и отсканированного изображения, тогда еще не было.
В 1991 году Даугман начал работу над алгоритмом распознавания параметров радужной оболочки глаза и в 1994 году получил патент на эту технологию. С этого момента ее лицензировали уже 22 компании, в том числе Sensar, British Telecom и японская OKI.
Получаемое при сканировании радужной оболочки глаза изображение обычно оказывается более информативным, чем оцифрованное в случае сканирования отпечатков пальцев.
Уникальность рисунка радужной оболочки глаза позволяет выпускать фирмам целый класс весьма надежных систем для биометрической идентификации личности. Для считывания узора радужной оболочки глаза применяется дистанционный способ снятия биометрической характеристики.
Системы этого класса, используя обычные видеокамеры, захватывают видеоизображение глаза на расстоянии до одного метра от видеокамеры, осуществляют автоматическое выделение зрачка и радужной оболочки. Пропускная способность таких систем очень высокая. Вероятность же ложных срабатываний небольшая. Кроме этого, предусмотрена защита от муляжа. Они воспринимают только глаз живого человека. Еще одно достоинство этого метода идентификации - высокая помехоустойчивость. На работоспособность системы не влияют очки, контактные линзы и солнечные блики.
Преимущество сканеров для радужной оболочки состоит в том, что они не требуют, чтобы пользователь сосредоточился на цели, потому что образец пятен на радужной оболочке находится на поверхности глаза. Даже у людей с ослабленным зрением, но с неповрежденной радужной оболочкой, все равно могут сканироваться и кодироваться идентифицирующие параметры. Даже если есть катаракта (повреждение хрусталика глаза, которое находится позади радужной оболочки), то и она никак не влияет на процесс сканирования радужной оболочки. Однако плохая фокусировка камеры, солнечный блик и другие трудности при распознавании приводят к ошибкам в 1% случаев.
В качестве такого устройства идентификации можно привести, например, электронную систему контроля доступа «Iris Access 3000», созданную компанией LG. Эта система за считанные секунды считывает рисунок оболочки, оцифровывает его, сравнивает с 4000 других записей, которые она способна хранить в своей памяти, и посылает соответствующий сигнал в систему безопасности, в которую она интегрирована. Система очень проста в эксплуатации, но при этом, данная технология
обеспечивает высокую степень защищенности.
Считыватель сетчатки объекта. Модель ICAM 2001. В состав системы входят:
устройство регистрации пользователей EOU 3000;
оптическое устройство идентификации / оптический считыватель ROU 3000;
контроллер двери ICU 3000;
сервер.
Устройство регистрации пользователей EOU 3000 обеспечивает начальный этап процесса регистрации пользователей. Оно снимает изображение радужной оболочки глаза при помощи камеры и подсветки. В процессе получения изображения и при его завершении устройство использует голосовую и световую подсказку.
Оптическое устройство идентификации, оно же оптический считыватель ROU 3000, содержит элементы для получения изображения радужной оболочки глаза. Голосовая и световая индикация информирует пользователя, определен он системой или нет.
Контроллер двери ICU 3000 создает специальный код (IrisCode) изображения сетчатки глаза, получаемой от считывателя ROU, сравнивает этоткод с уже имеющимися в его памяти кодами изображений. При идентификации соответствующего кода, результат сообщается голосом из динамика в считывателе ROU
3000. К контроллеру возможно подключение до четырех считывателей ROD 3000, что обеспечивает управление четырьмя дверями.
Сервер выполнен на базе персонального компьютера. Он выполняет функции главного сервера, сервера,
станции регистрации пользователей, станции мониторинга и управления системой. Главный сервер контролирует передачу информации из базы данных по запросу от одного сервера другим серверам. Сервер отвечает за управление рабочими станциями и контроллерами дверей ICU. Станция ввода изображения обеспечивает регистрацию пользователей при помощи устройства EOU 3000. Станция мониторинга производит отслеживание статуса контроллеров ICU, оптических считывателей ROU? устройства регистрации и состояния дверей ROU. Станция управления обеспечивает поддержку основной базы данных пользователей, загрузку необходимых данных в контроллер ICU.
Пример построения системы доступа на основе электронной системы распознавания радужной оболочки глаза «Iris Access 3000» представлен на рисунке.
Перспективы распространения этого способа биометрической идентификации для организации доступа в компьютерных системах очень хорошие. Тем более, что сейчас уже существуют мультимедийные мониторы со встроенными в корпус видеокамерами. Поэтому на такой компьютер достаточно установить необходимое программное обеспечение, и
Одной из наиболее важных проблем при использовании сетчатки глаза для распознавания личности является движение головы или глаза во время сканирования. Из-за этих движений может возникнуть смещение, вращение и масштабирование относительно образца из базы данных (рис. 1).Рис. 1. Результат движения головы и глаза при сканировании сетчатки.
Влияние изменения масштаба на сравнение сетчаток не так критично, как влияние других параметров, поскольку положение головы и глаза более или менее зафиксировано по оси, соответствующей масштабу. В случае, когда масштабирование всё же есть, оно столь мало, что не оказывает практически никакого влияния на сравнение сетчаток. Таким образом, основным требованием к алгоритму является устойчивость к вращению и смещению сетчатки.
Алгоритмы аутентификации по сетчатке глаза можно разделить на два типа: те, которые для извлечения признаков используют алгоритмы сегментации (алгоритм, основанный на методе фазовой корреляции; алгоритм, основанный на поиске точек разветвления) и те, которые извлекают признаки непосредственно с изображения сетчатки (алгоритм, использующий углы Харриса).
1. Алгоритм, основанный на методе фазовой корреляции
Суть алгоритма заключается в том, что при помощи метода фазовой корреляции оцениваются смещение и вращение одного изображения относительно другого. После чего изображения выравниваются и вычисляется показатель их схожести.В реализации метод фазовой корреляции работает с бинарными изображениями, однако может применяться и для изображений в 8-битном цветовом пространстве.
Пусть и – изображения, одно из которых сдвинуто на относительно другого, а и – их преобразования Фурье, тогда:

Где – кросс-спектр;
– комплексно сопряженное
Вычисляя обратное преобразование Фурье кросс-спектра, получим импульс-функцию:
Найдя максимум этой функции, найдём искомое смещение.
Теперь найдём угол вращения при наличии смещения , используя полярные координаты:

Данная техника не всегда показывает хорошие результаты на практике из-за наличия небольших шумов и того, что часть сосудов может присутствовать на одном изображении и отсутствовать на другом. Чтобы это устранить применяется несколько итераций данного алгоритма, в том числе меняется порядок подачи изображений в функцию и порядок устранения смещения и вращения. На каждой итерации изображения выравниваются, после чего вычисляется их показатель схожести, затем находится максимальный показатель схожести, который и будет конечным результатом сравнения.
Показатель схожести вычисляется следующим образом:
2. Алгоритм, использующий углы Харриса
Данный алгоритм, в отличие от предыдущего, не требует сегментации сосудов, поскольку может определять признаки не только на бинарном изображении.В начале изображения выравниваются при помощи метода фазовой корреляции, описанного в предыдущем разделе. Затем на изображениях ищутся углы (рис. 2).

Рис. 2. Результат поиска углов Харриса на изображениях сетчатки.
Пусть найдена M+1 точка, тогда для каждой j-й точки её декартовы координаты преобразуются в полярные и определяется вектор признаков где

Модель подобия между неизвестным вектором и вектором признаков размера N в точке j определяется следующим образом:

Где – константа, которая определяется ещё до поиска углов Харриса.
Функция описывает близость и похожесть вектора ко всем признакам точки j.
Пусть вектор – вектор признаков первого изображения, где размера K–1, а вектор – вектор признаков второго изображения, где размера J–1, тогда показатель схожести этих изображений вычисляется следующим образом:

Нормировочный коэффициент для similarity равняется
Коэффициент в оригинальной статье предлагается определять по следующему критерию: если разница между гистограммами изображений меньше заранее заданного значения, то = 0.25, в противном случае = 1.
3. Алгоритм, основанный на поиске точек разветвления
Данный алгоритм, как и предыдущий, ищет точки разветвления у системы кровеносных сосудов. При этом он более специализирован на поиске точек бифуркации и пересечения (рис. 3) и намного более устойчив к шумам, однако может работать только на бинарных изображениях.
Рис. 3. Типы признаков (слева – точка бифуркации, справа – точка пересечения).
Для поиска точек, как на рис. 3, сегментированные сосуды сжимаются до толщины одного пикселя. Таким образом, можно классифицировать каждую точку сосудов по количеству соседей S:
- если S = 1, то это конечная точка;
- если S = 2, то это внутренняя точка;
- если S = 3, то это точка бифуркации;
- если S = 4, то это точка пересечения.
3.1. Алгоритм сжатия сосудов до толщины одного пикселя и классификация точек разветвления
Вначале выполняется поиск пикселя, являющегося частью сосуда, сверху вниз слева направо. Предполагается, что каждый пиксель сосуда может иметь не более двух соседних пикселей сосудов (предыдущий и следующий), во избежание двусмысленности в последующих вычислениях.Далее анализируются 4 соседних пикселя найденной точки, которые ещё не были рассмотрены. Это приводит к 16 возможным конфигурациям (рис. 4). Если пиксель в середине окна не имеет соседей серого цвета, как показано на рис. 4 (a), то он отбрасывается и ищется другой пиксель кровеносных сосудов. В других случаях это либо конечная точка, либо внутренняя (не включая точки бифуркации и пересечения).

Рис. 4. 16 возможных конфигураций четырёх соседних пикселей (белые точки – фон, серые – сосуды). 3 верхних пикселя и один слева уже были проанализированы, поэтому игнорируются. Серые пиксели с крестиком внутри также игнорируются. Точки со стрелочкой внутри – точки, которые могут стать следующим центральным пикселем. Пиксели с чёрной точкой внутри – это конечные точки.
На каждом шаге сосед серого цвета последнего пикселя помечается как пройденный и выбирается следующим центральным пикселем в окошке 3 x 3. Выбор такого соседа определяется следующим критерием: наилучший сосед тот, у которого наибольшее количество непомеченных серых соседей. Такая эвристика обусловлена идеей поддержания однопиксельной толщины в середине сосуда, где большее число соседей серого цвета.
Из вышеизложенного алгоритма следует, что он приводит к разъединению сосудов. Также сосуды могут разъединиться ещё на этапе сегментации. Поэтому необходимо соединить их обратно.
Для восстановления связи между двумя близлежащими конечными точками определяются углы и как на рис. 5, и если они меньше заранее заданного угла то конечные точки объединяются.

Рис. 5. Объединение конечных точек после сжатия.
Чтобы восстановить точки бифуркации и пересечения (рис. 6) для каждой конечной точки вычисляется её направление, после чего производится расширение сегмента фиксированной длины Если это расширение пересекается с другим сегментом, то найдена точка бифуркации либо пересечения.

Рис. 6. Восстановление точки бифуркации.
Точка пересечения представляет собой две точки бифуркации, поэтому для упрощения задачи можно искать только точки бифуркации. Чтобы удалить ложные выбросы, вызванные точками пересечения, можно отбрасывать точки, которые находится слишком близко к другой найденной точке.
Для нахождения точек пересечения необходим дополнительный анализ (рис. 7).

Рис. 7. Классификация точек разветвления по количеству пересечений сосудов с окружностью. (a) Точка бифуркации. (b) Точка пересечения.
Как видно на рис. 7 (b), в зависимости от длины радиуса окружность с центром в точке разветвления может пересекаться с кровеносными сосудами либо в трех, либо в четырёх точках. Поэтому точка разветвления может быть не правильно классифицирована. Чтобы избавиться от этой проблемы используется система голосования, изображённая на рис. 8.

Рис. 8. Схема классификации точек бифуркации и пересечения.
В этой системе голосования точка разветвления классифицируется для трёх различных радиусов по количеству пересечений окружности с кровеносными сосудами. Радиусы определяются как: где и принимают фиксированные значения. При этом вычисляются два значения и означающие количество голосов за то, чтобы точка была классифицирована как точка пересечения и как точка бифуркации соответственно:

Где и – бинарные значения, указывающие идентифицирована ли точка с использованием радиуса как точка пересечения либо как точка бифуркации соответственно.
В случае если то тип точки не определён. Если же значение отличаются друг от друга, то при точка классифицируется как точка пересечения, в противном случае как точка бифуркации.
3.2. Поиск преобразования подобия и определение метрики схожести
После того, как точки найдены, необходимо найти преобразование подобия. Это преобразование описывается 4 параметрами – смещение по оси и , масштаб и вращение соответственно.Само преобразование определяется как:

Где – координаты точки на первом изображении
– на втором изображении
Для нахождения преобразования подобия используются пары контрольных точек. Например, точки определяют вектор где – координаты начала вектора, – длина вектора и – направление вектора. Таким же образом определяется вектор для точек Пример представлен на рис. 9.

Рис. 9. Пример двух пар контрольных точек.
Параметры преобразования подобия находятся из следующих равенств:

Пусть количество найденных точек на первом изображения равняется M, а на втором N, тогда количество пар контрольных точек на первом изображении равно а на втором Таким образом, получаем ![]() возможных преобразований, среди которых верным выбирается то, при котором количество совпавших точек наибольшее.
возможных преобразований, среди которых верным выбирается то, при котором количество совпавших точек наибольшее.
Поскольку значение параметра S близко к единице, то T можно уменьшить, отбрасывая пары точек, неудовлетворяющие следующему неравенству:
![]()
Где – это минимальный порог для параметра
– это максимальный порог для параметра
– пара контрольных точек из
– пара контрольных точек из
После применения одного из возможных вариантов выравнивания для точек и вычисляется показатель схожести:
![]()
Где – пороговая максимальная дистанция между точками.
В случае если то
В некоторых случаях обе точки могут иметь хорошее значение похожести с точкой . Это случается, когда и находятся близко друг к другу. Для определения наиболее подходящей пары вычисляется вероятность схожести:
Где
Если то
Чтобы найти количество совпавших точек строится матрица Q размера M x N так, что в i-й строке и j-м столбце содержится
Затем в матрице Q ищется максимальный ненулевой элемент. Пусть этот элемент содержится в -й строке и -м столбце, тогда точки и определяются как совпавшие, а -я строка и -й столбец обнуляются. После чего опять ищется максимальный элемент. Поиск таких максимумов повторяется до тех пор, пока все элементы матрицы Q не обнулятся. На выходе алгоритма получаем количество совпавших точек C.
Метрику схожести двух сетчаток можно определить несколькими способами:
Где – параметр, который вводится для настройки влияния количества совпавших точек;
f выбирается одним из следующих вариантов:

Метрика нормализуется одним из двух способов:

Где и – некоторые константы.
3.3. Дополнительные усложнения алгоритма
Метод, основанный на поиске точек разветвления, можно усложнить, добавляя дополнительные признаки, например углы, как на рис. 10.
Рис. 10. Углы, образованные точками разветвления, в качестве дополнительных признаков.
Также можно применять шифр гаммирования. Как известно, сложение по модулю 2 является абсолютно стойким шифром, когда длина ключа равна длине текста, а поскольку количество точек бифуркации и пересечения не превышает порядка 100, но всё же больше длины обычных паролей, то в качестве ключа можно использовать комбинацию хешей пароля. Это избавляет от необходимости хранить в базе данных сетчатки глаза и хеши паролей. Нужно хранить только координаты, зашифрованные абсолютно стойким шифром.
Заключение
Аутентификация по сетчатке действительно показывает точные результаты. Алгоритм, основанный на методе фазовой корреляции, не допустил ни одной ошибки при тестировании на базе данных VARIA. Также алгоритм был протестирован на неразмеченной базе MESSIDOR с целью проверки алгоритма на ложные срабатывания. Все найденные алгоритмом пары похожих сетчаток были проверены вручную. Они действительно являются одинаковыми. На сравнение кровеносных сосудов двух сетчаток глаз из базы VARIA уходит в среднем 1.2 секунды на двух ядрах процессора Pentium Dual-CoreT4500 с частотой 2.30 GHz. Время исполнения алгоритма получилось довольно большое для идентификации, но оно приемлемо для аутентификации.Также была предпринята попытка реализации алгоритма, использующего углы Харриса, но получить удовлетворительных результатов не удалось. Как и в предыдущем алгоритме, возникла проблема в устранении вращения и смещения при помощи метода фазовой корреляции. Вторая проблема связана с недостатками алгоритма поиска углов Харриса. При одном и том же пороговом значении для отсева точек, количество найденных точек может оказаться либо слишком большим либо слишком малым.
В дальнейших планах стоит разработка алгоритма, основанного на поиске точек разветвления. Он требует гораздо меньше вычислительных ресурсов по сравнению с алгоритмом, основанном на методе фазовой корреляции. Кроме того, существуют возможности для его усложнения в целях сведения к минимуму вероятности взлома системы.
Другим интересным направлением в дальнейших исследованиях является разработка автоматических систем для ранней диагностики заболеваний, таких как глаукома, сахарный диабет, атеросклероз и многие другие.
P.s. по немногочисленным просьбам выкладываю
Технология сканирования радужной оболочки глаза была впервые предложена в 1936 году офтальмологом Франком Буршем. Он заявил, что радужная оболочка глаза каждого человека является уникальной. Вероятность ее совпадения составляет примерно 10 в минус 78-ой степени, что значительно выше, чем при дактилоскопии. Согласно теории вероятности, за всю историю человечества еще не было двух людей, у которых бы совпал узор глаза. В начале 90-х Джон Дафман из компании Iridian Technologies запатентовал алгоритм для обнаружения различий радужной оболочки глаза. На данный момент этот способ биометрической аутентификации является одним из наиболее эффективных и производится с помощью специального сенсора - иридосканера.
Радужная оболочка глаза - это тонкая подвижная диафрагма со зрачком в центре, которая расположена за роговицей перед хрусталиком глаза. Она образовывается ещё до рождения человека и не меняется на протяжении всей жизни. По текстуре радужная оболочка напоминает сеть с большим количеством кругов, при этом ее рисунок очень сложен, что позволяет отобрать порядка 200 точек, с помощью которых обеспечивается высокая степень надежности аутентификации.
Сканер радужной оболочки глаза часто ошибочно называют сканером сетчатки. Отличие заключается в том, что сетчатка расположена внутри глаза и просканировать ее оптическим сенсором невозможно, только с помощью инфракрасного излучения. При этом анализируется не сама сетчатка, а узор кровеносных сосудов глазного дна. Называть подобный сенсор иридосканером неправильно, так как iris – это радужка, сетчатка же имеет название retina.

В основе иридосканера современного смартфона лежит высококонтрастная камера, подобная обычной камере. Иногда роль сканера радужной оболочки может выполнять и обычная фронтальная камера. Процесс аутентификации начинается с получения детального изображения глаза человека. Для этой цели используют монохромную камеру с неяркой подсветкой, которая чувствительна к инфракрасному излучению и позволяет работать в условиях недостаточной освещенности. Обычно делается серия из нескольких фотографий, так как зрачок чувствителен к свету и постоянно меняет свой размер. Затем из полученных фотографий выбирается одна наиболее удачная, определяются границы радужки и контрольная область. К каждой точке выбранной области применяют специальные фильтры, чтобы извлечь фазовую информацию и преобразовать рисунок оболочки в цифровой формат. Очки и контактные линзы, даже цветные, не влияют на качество аутентификации.

Внедрение сканера радужной оболочки глаза в смартфоны началось в 2015 году. Первыми его стали устанавливать китайские и японские производители. В частности первопроходцем был ViewSonic V55, так и не поступивший в массовую продажу. Из самых новых устройств, оснащенных иридосканером, можно выделить Samsung Galaxy S8, однако его сканер с легкостью удалось обмануть хакерам, распечатавшим фотографию на принтере и положившим на нее контактную линзу.
Технология сканирования радужной оболочки глаза была впервые предложена в 1936 году офтальмологом Франком Буршем. Он заявил, что радужная оболочка глаза каждого человека является уникальной. Вероятность ее совпадения составляет примерно 10 в минус 78-ой степени, что значительно выше, чем при дактилоскопии. Согласно теории вероятности, за всю историю человечества еще не было двух людей, у которых бы совпал узор глаза. В начале 90-х Джон Дафман из компании Iridian Technologies запатентовал алгоритм для обнаружения различий радужной оболочки глаза. На данный момент этот способ биометрической аутентификации является одним из наиболее эффективных и производится с помощью специального сенсора - иридосканера.
Радужная оболочка глаза - это тонкая подвижная диафрагма со зрачком в центре, которая расположена за роговицей перед хрусталиком глаза. Она образовывается ещё до рождения человека и не меняется на протяжении всей жизни. По текстуре радужная оболочка напоминает сеть с большим количеством кругов, при этом ее рисунок очень сложен, что позволяет отобрать порядка 200 точек, с помощью которых обеспечивается высокая степень надежности аутентификации.
Сканер радужной оболочки глаза часто ошибочно называют сканером сетчатки. Отличие заключается в том, что сетчатка расположена внутри глаза и просканировать ее оптическим сенсором невозможно, только с помощью инфракрасного излучения. При этом анализируется не сама сетчатка, а узор кровеносных сосудов глазного дна. Называть подобный сенсор иридосканером неправильно, так как iris – это радужка, сетчатка же имеет название retina.
В основе иридосканера современного смартфона лежит высококонтрастная камера, подобная обычной камере. Иногда роль сканера радужной оболочки может выполнять и обычная фронтальная камера. Процесс аутентификации начинается с получения детального изображения глаза человека. Для этой цели используют монохромную камеру с неяркой подсветкой, которая чувствительна к инфракрасному излучению и позволяет работать в условиях недостаточной освещенности. Обычно делается серия из нескольких фотографий, так как зрачок чувствителен к свету и постоянно меняет свой размер. Затем из полученных фотографий выбирается одна наиболее удачная, определяются границы радужки и контрольная область. К каждой точке выбранной области применяют специальные фильтры, чтобы извлечь фазовую информацию и преобразовать рисунок оболочки в цифровой формат. Очки и контактные линзы, даже цветные, не влияют на качество аутентификации.
Внедрение сканера радужной оболочки глаза в смартфоны началось в 2015 году. Первыми его стали устанавливать китайские и японские производители. В частности первопроходцем был ViewSonic V55, так и не поступивший в массовую продажу. Из самых новых устройств, оснащенных иридосканером, можно выделить Samsung Galaxy S8, однако его сканер с легкостью удалось обмануть хакерам, распечатавшим фотографию на принтере и положившим на нее контактную линзу.
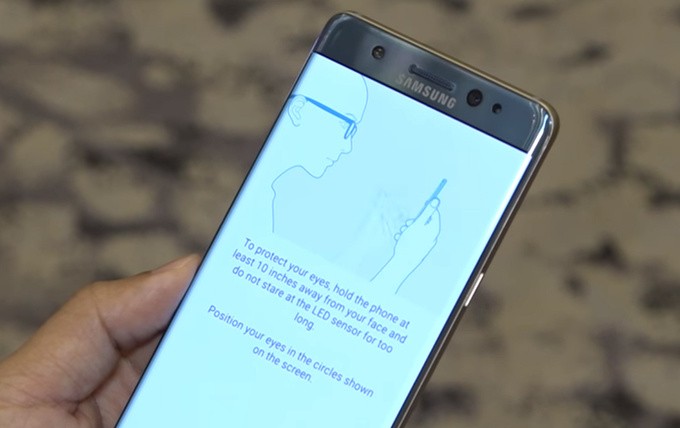
Не так давно был представлен новый флагман Samsung Galaxy Note 7. Одной из его ключевых функций стала возможность разблокировки устройства при помощи сканирования радужки глаза.
Как выглядит общая схема сканирования радужной оболочки глаза
Радужная оболочка наших глаз, как и отпечаток пальца имеет свой неповторимый рисунок. Поэтому это удобное средство аутентификации. Биометрические гражданские паспорта, если вы помните, фиксируют именно эту информацию, потому что в отличие от отпечатка пальцев, радужку глаза подделать пока не представляется возможным. Кроме того со временем она не изменяется.
Однако сканер не просто фотографирует ваш глаз, а потом сверяет с исходником. На практике процедура начинается с направленного инфракрасного луча ближнего спектра. Этот свет для идентификации подходит гораздо лучше, чем дневной, потому что камере легче захватить рисунок радужки, подсвеченный именно ИК-светом. Кроме того, такой сканер может работать в темноте. При этом процедуре идентификации радужной оболочки могут подвергаться даже люди с плохим зрением, так как ИК-луч свободно проходит через прозрачные очки и линзы. После того, как рисунок радужки зафиксирован, алгоритм переводит рисунок радужной оболочки глаза в код, который сравнивается с имеющейся базой.
Захват изображения глаза — полученная картинка — определение радужки и века — выделение этой области — удаление века с картинки — нормализация этой области — транскодирование — сравнение с базой данных
В чём особенность сканера Samsung Galaxy Note 7?
По большей части, сканер нового фаблета от Samsung работает по описанной выше схеме, любопытная деталь заключается в том, что на фронтальной панели Galaxy Note 7 располагается камера, которая занимается исключительно распознаванием радужной оболочки глаза. Почему же фронтальная камера не может выполнять эту задачу? Потому что камера должна быть чувствительна к ИК спектру. В обычных камерах ИК свет фильтруется, так как он портит обычные фотографии. Кроме этого считывающая камера имеет более узкий угол обзора, чтобы видеть глаз пользователя лучше, особенно на расстоянии.

Насколько это безопасно?
Некоторые пользователи выразили озабоченность по поводу того, что такой сканер в Samsung Galaxy Note 7 может быть небезопасен, в частности, не приведёт ли его частое использование к необратимому повреждению глаз. Такие вопросы вполне резонны, ведь для сканирования смартфон отправляет луч света прямо в ваш глаз, и так как этот свет невидим для человека, то зрачок никак не пытается от него защититься, поэтому свет попадает на сетчатку, не встречая никаких преград.
На самом деле мы не можем быть на 100% уверенными, что частое использование сканера радужки глаза Samsung Galaxy Note 7 не будет иметь какого-то влияния на наши глаза. Если сейчас эту статью читает окулист, мы будем рады услышать ваше экспертное мнение в этом вопросе.
Сама компания предупреждает пользователей, что подносить смартфон слишком близко к глазам во время идентификации не нужно, если следовать этому предостережению всё должно быть хорошо. Однако так как считывание радужки не такое частое явление, массового тестирования и результатов, сделанных на основе людей, пока нет. Когда они появятся, может быть уже слишком поздно кого-то предупреждать, а может быть и наоборот — придёт подтверждение, что функция полностью безопасна.
Это тоже самое, что сканер сетчатки?
Если вы запутались — проясню, да сканирование радужки и сетчатки — процессы схожие, но различаются по основному принципу. При сканировании сетчатки, алгоритм считывает не рисунок сетчатки, а изображение глазного дна. Но для бытовых условий гораздо проще пользоваться сканером радужной оболочки, так как для считывания сетчатки устройство нужно подносить вплотную к глазу. В случае со смартфоном это выглядело бы очень глупо.
Зачем это нужно?
В смартфонах уже давно есть считыватели отпечатков пальцев, они быстрые надёжные безопасные и достаточно дешёвые, чтобы быть установленными даже в китайских смартфонах дешевле $200. Зачем тогда нам сканеры радужной оболочки? Главным образом затем, что они в несколько раз более надёжны и безопасны. Главным доводом является то, что отпечатки пальцев мы оставляем почти на каждой поверхности, к которой прикасаемся, а значит копию отпечатка гораздо проще достать. При этом мокрые и грязные пальцы устройству часто тяжело распознать. Получить копию радужной оболочки крайне тяжело, а глаза изнутри никогда не заляпаны грязью, поэтому владельцу воспользоваться аутентификацией в любых условиях гораздо проще. Хотя, в кино уже давно придумали способ, как обойти эту защиту:

Есть ли у технологии будущее?
Я считаю, что сканер Samsung Galaxy Note 7 не сделает его хитом. Да, эта технология работает и ей можно лихо хвастаться друзьям, но для большинства — использование сканера отпечатка пальцев будет достаточно. Однако не исключено, что новинку оценит, в первую очередь, корпоративный сегмент, которому необходимо лучше, чем остальным защищать информацию на своём смартфоне. Для простых обывателей, думается мне, будет слишком лениво подносить смартфон на определённое расстояние, при этом совершая необходимые действия. Но это не говорит о том, что Samsung не разовьёт технологию или о том, что она неожиданно не выстрелит и перекочует даже в iPhone. Шансы у этой серьёзной игрушки есть.