Influenza sulla stabilità dell'azionamento elettrico della tensione di rete.
Considerare l'influenza della tensione di rete sulla stabilità dell'azionamento elettrico dei cambiamenti
attuale.
Con profondi buchi della tensione di rete, il funzionamento di un motore asincrono diventa
instabile: il motore potrebbe ribaltarsi.
Per ribaltamento si intende la modalità di emergenza di un motore asincrono; a co-
toro si ferma o inverte. La condizione di rollover è:
M"< М ,
Dove M"- momento critico del motore a bassa tensione;
M- momento statico del meccanismo.
In altre parole, si verificherà un ribaltamento se il momento critico del motore diventa inferiore al momento statico del meccanismo.
Ricordiamo che il momento critico di un motore a induzione è proporzionale al quadrato della tensione:
Dove U E F- rispettivamente, la tensione e la frequenza della rete di alimentazione.
Ne consegue che al calo di tensione consentito dalle Regole del Registro
rete pari al 15% ( U" = 0,85U), sarà il nuovo valore ridotto del momento critico
M"\u003d M \u003d (0,85) M \u003d 0,7225 M ≈ 0,7 M.
Le conseguenze del ribaltamento dipendono dalla natura del momento statico del meccanismo.
ma, vale a dire:
1. In caso di coppia statica reattiva, il motore si ferma ed entra in modalità standby energizzato (pompe, ventilatori);
2. con un momento statico attivo, il motore prima si ferma, poi inverte la marcia e, sotto l'influenza del peso, inizia ad accelerare in direzione della discesa
velocità decrescente (meccanismi di sollevamento e dispositivi di ancoraggio).

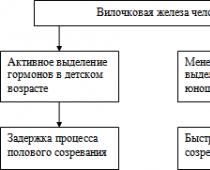
Riso. 8.11. Processi transitori in caso di ribaltamento del motore: a - con momento reattivo statico (pompa, ventola); b - con un momento statico attivo (cigno-
ka, verricello)
Considera il processo di ribaltamento del motore con la coppia di reazione del meccanismo
(Fig. 8.11, a).
Fino al calo di tensione, il motore funziona secondo una caratteristica meccanica naturale.
ristico (EMH) nel punto A con una velocità costante ω.
In caso di interruzione di tensione, il motore passa dal punto A su EMX al punto B su artificiale
caratteristica meccanica (IMC). La velocità del motore elettrico non ha il tempo di cambiare
a causa dell'inerzia delle parti mobili dell'azionamento elettrico, quindi, nel punto B, la velocità è la stessa del punto A.
Poiché nel punto B il momento del motore M è inferiore al momento del meccanismo M, il motore
il tel inizia a ridurre la velocità fino al punto C. A questo punto, il momento critico (massimo)
poliziotto del motore M"< М, поэтому двигатель продолжит уменьшать скорость до точки Д.
A questo punto il motore si fermerà e verrà energizzato con una coppia di cortocircuito.
fischio Mdo tech. fino all'attivazione della protezione termica.
I meccanismi con momenti statici attivi (verricelli da carico, verricelli) si invertono sotto l'azione del peso del carico o dell'ancora durante il ribaltamento (Fig. 8.11, b).
Il processo transitorio in caso di caduta di tensione procede dapprima come il precedente
stabilità dinamica chiamata la capacità della nave di resistere, senza capovolgersi, agli effetti dinamici dei momenti esterni.
Fino ad ora, quando si consideravano i problemi di stabilità, si presumeva che il momento sbandante agisse sulla nave in modo statico, cioè il momento sbandante m cr era pari al momento ripristinante m Θ . Potrebbe essere:
1) o con un aumento di m cr così lento che in ogni momento si realizza l'uguaglianza m cr = m Θ;
2) sia nella posizione della nave, quando è trascorso molto tempo dal momento m kr della domanda.
Infatti, in molti casi, il momento sbandante viene applicato dinamicamente alla nave (onda che rotola, vento squallido, ecc.). In questi casi il momento sbandante aumenta più velocemente del momento ripristinante e non viene rispettata l'uguaglianza tra i momenti. Di conseguenza, il processo di inclinazione della nave viene accelerato.
Viene chiamato l'angolo di sbandamento maggiore che la nave raggiunge quando si inclina con accelerazione angolo dinamico rotolo Θ din. Il valore di Θ dyn supera significativamente il valore dell'angolo statico di sbandamento Θ c (a m kr.din = m kr.st). È possibile il caso in cui, con un'accelerazione angolare significativa, il valore di Θ dyn risulta essere così grande da ribaltare la nave (con un'applicazione statica non pericolosa per la nave, pari in grandezza a m kr).
Nella teoria navale, quando si studiano le inclinazioni dinamiche, si assume solitamente che l'acqua e l'aria non resistano a tale inclinazione; questa ipotesi porta ad un errore nella direzione sicura.
3.11.1 Inclinazione della nave sotto l'azione dinamica del momento sbandante. Supponiamo che un momento m kr sia applicato dinamicamente a una nave avente Θ = 0, che poi continua ad agire staticamente, senza cambiare in grandezza con una variazione dell'angolo di sbandamento Θ (Fig. 3.25).
Nella sezione di inclinazione della nave da Θ = 0 a Θ st, quando m cr > m Θ, si accumula energia cinetica a causa dell'eccessivo lavoro del momento sbandante, la velocità angolare aumenta dΘ / dt, l'accelerazione angolare d 2 Θ / dt 2 è positivo, ma il suo valore diminuisce a causa del contrasto del momento ripristinante. A Θ = Θ st, quando m kr = m Θ , la velocità di inclinazione e l'energia cinetica della nave raggiungono i loro valori massimi e l'accelerazione è zero.
Nel punto di inclinazione della nave da Θ st a Θ dyn, quando m kr< m Θ , накопленная ранее кинетическая энергия погашается противоположной по знаку избыточной работой восстанавливающего момента, скорость наклонения уменьшается, ускорение отрицательное и с нарастанием угла Θ величина его растет. Наклонение судна прекращается в точке Θ дин, в которой наблюдается равенство работ кренящего А кр и восстанавливающего моментов А Θ . Эти работы можно записать как

Figura 3.25 - Considerare le inclinazioni dinamiche
La posizione della nave con Θ = Θ dyn non è una posizione di equilibrio. Sotto l'azione di un momento di ripristino in eccesso, la nave inizierà a raddrizzarsi (fino a Θ = Θst accelerata, quindi rallentata) e raggiungerà la posizione Θ = 0 (in assenza di forze di resistenza) con velocità angolare nulla. Successivamente, il fenomeno si ripete: la nave oscillerà attorno alla posizione Θ = Θ st. In assenza di resistenza a queste oscillazioni da parte dell’acqua e dell’aria, potrebbero continuare indefinitamente. Infatti, nel caso in esame, la nave compie oscillazioni smorzate e, di conseguenza, si ferma nella posizione di equilibrio con un angolo Θ st.
3.11.2 Determinazione dell'angolo dinamico dello sbandamento della nave. Stock di stabilità dinamica. Il valore dell'angolo Θ dyn quando agisce sulla nave il momento m kr di dato valore si può ricavare utilizzando l'uguaglianza dei lavori A cr = A Θ con un'inclinazione Θ = Θ dyn
(m cr – m Θ) dΘ = 0,
oppure (m cr – m Θ) dΘ + (m cr – m Θ) dΘ = 0
oppure (m cr – m Θ) dΘ = (m Θ – m cr) dΘ,
 dove l'integrale (m cr - m Θ) dΘ = δА cr esprime il lavoro in eccesso del momento sbandante nella sezione di inclinazione della nave da Θ = 0 a Θ st, e l'integrale (m Θ - m cr) dΘ = δА Θ - il lavoro in eccesso del momento ripristinante sulla sezione di inclinazione della nave da Θ st a Θ dyn.
dove l'integrale (m cr - m Θ) dΘ = δА cr esprime il lavoro in eccesso del momento sbandante nella sezione di inclinazione della nave da Θ = 0 a Θ st, e l'integrale (m Θ - m cr) dΘ = δА Θ - il lavoro in eccesso del momento ripristinante sulla sezione di inclinazione della nave da Θ st a Θ dyn.
Figura 3.26 - Determinare gli angoli di rollio dinamico della nave.
Nella fig. 3.26 il lavoro del momento sbandante A cr è un rettangolo OKVD, e il lavoro del momento ripristinante A Θ è un trapezio curvilineo OAMBD. Le aree ombreggiate 1 (OKA) e 2 (AMV) corrispondono al lavoro in eccesso dello sbandamento δА cr e ai momenti di ripristino δА Θ .
Pertanto l’angolo Θ dyn può essere determinato graficamente dal diagramma di stabilità statica a partire dalla condizione di uguaglianza in termini di area 1 e 2.
Come si può vedere dalla figura. 3.26, con un tipico diagramma di stabilità statica Θ dyn » 2 Θ st.
Da quanto sopra è ovvio che il lavoro del momento ripristinante può servire come misura della stabilità dinamica della nave. L'area sul DSO sotto la curva m Θ (Θ) ОАМВN (in Fig. 3.26), che caratterizza il lavoro A Θ, è chiamata margine di stabilità dinamica nave (ZDO). Maggiore è questa area, maggiore è la stabilità dinamica della nave durante la navigazione in linea retta. Se si considera la Figura 6.3, diventa ovvio che minore è l'altezza metacentrica del vaso, minore è non solo il margine di stabilità statica, ma anche quello dinamico. Quando una nave naviga con un angolo di sbandamento statico Θ st.1, il margine di stabilità dinamica diminuisce e nella Figura 3.26 è determinato solo dall'area AMB compresa tra la curva m Θ (Θ) e m kr (Θ).
3.11.3 Limiti di stabilità dinamica della nave. Questi limiti sono:
Momento massimo di sbandamento m kr.dyn. max , la cui applicazione dinamica non ha ancora causato il capovolgimento della nave ( momento di ribaltamento);
Angolo di inclinazione dinamico massimo Θ dyn. massimo
Per trovare i valori di m kr.dyn. max e Θ din. max, è possibile utilizzare il diagramma di stabilità statica (Fig. 6.11). All'aumentare di m cr. l'angolo Θ dyn aumenta. Per alcuni m cr. = m cr.din. max , che corrisponde al caso limite di uguaglianza delle aree 1 e 2, quando può ancora essere assicurata l'uguaglianza del lavoro in eccesso dei momenti contrastanti e sbandanti, l'angolo Θ dyn = Θ dyn. massimo Pertanto, Θ din. max è determinato dal punto di intersezione del grafico m kr (Θ), corrispondente a m kr.din. max , con il ramo discendente del DSO.
Se, con l'applicazione dinamica del momento di sbandamento, il suo valore m kr > m kr.din. max , allora il lavoro in eccesso del momento sbandante non potrà più essere completamente estinto dal lavoro in eccesso del momento ripristinante, e la nave si capovolgerà. Con un'applicazione statica della stessa grandezza del momento m kr, la sicurezza della navigazione della nave è garantita se solo m kr £ m kr.st. massimo Dalla fig. 3.26 si può vedere che m kr.din. massimo< m кр.ст. max .
Pertanto, la stabilità dinamica della nave sotto l'influenza di m kr di un dato valore è garantita se l'angolo dinamico di sbandamento non supera il valore al quale il lavoro del momento sbandante può ancora essere compensato dal lavoro del momento ripristinante .
3.11.4 Diagramma della stabilità dinamica della nave. Per risolvere problemi di stabilità dinamica, è conveniente da usare diagramma di stabilità dinamica(DDO), che determina il lavoro del momento ripristinante A Θ per ciascun valore dell'angolo Θ (Fig. 3.27).
Come è noto, l'azione del momento ripristinante sull'angolo di sbandamento può essere rappresentata dall'espressione
E Θ = mΘ dΘ,

Figura 3.27 - Diagramma di stabilità dinamica
dove la funzione m Θ (Θ) è un diagramma di stabilità statica (DSS).
Pertanto, DDO è una curva integrale rispetto a DSO. Come ogni curva integrale, ha le seguenti proprietà:
1) ciascuna delle sue ordinate esprime l'area sotto il DSO lungo tale ordinata;
2) il punto di flesso (punto B) corrisponde al massimo DSO;
3) il massimo della curva integrale (punto C) corrisponde all'angolo di tramonto del DSO;
4) l'ordinata DDO in Θ = Θ zak determina il margine di stabilità dinamica della nave nella posizione di equilibrio prodiero;
5) la tangente dell'angolo della tangente tracciata al diagramma di stabilità dinamica determina l'ordinata del diagramma di stabilità statica a parità di angolo di sbandamento.
Poiché m Θ = γV l Θ , l'espressione del lavoro del momento ripristinante può essere scritta come
A Θ = m Θ dΘ = γV l Θ dΘ = γV l Θ dΘ = γV l dyn,
Quando si risolvono i problemi di ribaltamento, viene considerata la posizione limite in cui il corpo si trova in uno stato di equilibrio instabile, cioè quando è pronto a passare dallo stato di riposo al movimento. Qualsiasi leggero cambiamento negli elementi strutturali o nelle forze che agiscono su questa struttura porta al ribaltamento (rotazione) della struttura attorno ad un asse, chiamato asse di ribaltamento, perpendicolare al piano del disegno. La condizione di equilibrio per un tale corpo (struttura) è l'uguaglianza a zero della somma dei momenti relativi al punto di intersezione dell'asse di ribaltamento con il piano del disegno di tutte le forze (attive) date che agiscono sul corpo:
![]()
Quando si compila l'equazione, è necessario ricordare che le reazioni dei supporti non sono incluse in questa equazione, poiché nella posizione limite la struttura poggia solo su quei supporti attraverso i quali passa l'asse di ribaltamento. Le grandezze che si determinano dall'equazione hanno valori critici (massimo o minimo) e, per garantire il margine di stabilità, dovrebbero essere rispettivamente ridotte in fase di progettazione (quelle per le quali è stato trovato il massimo valore possibile all'equilibrio) o aumentate ( quelli per i quali all'equilibrio è stato trovato il minimo valore possibile).
Parte delle forze attive che agiscono sul corpo creano coppie che tendono a ribaltare il corpo. La somma dei momenti di tali forze, rispetto all'asse ribaltante, è chiamata momento ribaltante:
![]()
Un'altra parte delle forze attive crea coppie che tendono a riportare il corpo nella sua posizione originale.
La somma dei momenti di tali forze attorno all'asse di ribaltamento è chiamata momento di stabilità:
![]()
Il rapporto tra il valore assoluto del momento di stabilità e il valore assoluto del momento di ribaltamento è chiamato coefficiente di stabilità:

Problema 15. Una torre dell'acqua è costituita da un serbatoio cilindrico con altezza e diametro fissati su quattro pilastri disposti simmetricamente e inclinati rispetto all'orizzonte (Fig. 48). Il fondo della vasca è ad una quota superiore al livello dei supporti; il peso della torre, la pressione del vento viene calcolata sull'area di proiezione della superficie del serbatoio su un piano perpendicolare alla direzione del vento e la pressione specifica del vento viene presa pari a Determinare la distanza richiesta tra le basi della torre pilastri.
Soluzione. 1. Considerare l'equilibrio della torre dell'acqua (Fig. 49). Poiché è necessario determinare il valore critico della distanza tra le basi dei pilastri, vale a dire, consideriamo che la torre sia in uno stato di equilibrio instabile, cioè con la minima diminuzione di questa distanza, la torre crollerà sotto il azione del vento, ruotando attorno alla cerniera A in senso antiorario.
Pertanto, in una posizione di equilibrio instabile, si deve assumere che la torre con i supporti B tocchi solo il suolo, ma non prema sul suolo,
2. Raffigurante le forze attive che agiscono sulla torre. La forza è il peso della torre e la forza della pressione del vento sul serbatoio.
uno spostamento
La risultante delle forze verticali normative a livello della base della fondazione
ΣN II = 1463,56 kN (vedi 2.3)
Forza di taglio normativa F h \u003d 22 kN
Forza di tenuta di progetto F h c = f ΣN I o ΣS i ;
f0,3 - coefficiente di attrito del suolo
La somma degli sforzi calcolati ΣN I =γ n ·ΣN II ; γn=0,9.
ΣN I \u003d 0,9 1463,56 \u003d 1317,2 kN;
F h c \u003d 0,3 1317,2 \u003d 395,2 kN
Forza di taglio stimata F h = γ n F h ; F h \u003d 1,2 22 \u003d 26,4 kN
La stabilità è assicurata se F h F h con
Fh = 26,4< F h с = 395,2кН
b) ribaltamento
Momento ribaltante da carichi standard; dai carichi di progetto
M o = M II + F h · h f M o = γ n · M o ; γ n = 1,2;
M o \u003d 90 + 22 1,5 \u003d 12 kNm M o \u003d 1,2 123 \u003d 147,6 kNm
Momento di tenuta da carichi normativi
Umore = 0,5 v ΣN
Fango \u003d 0,5 3 1463,56 \u003d 2195,3 kNm
Momento di tenuta derivante dai carichi di progetto
Umore I \u003d 0,5v γ n ΣN II, γ n \u003d 0,9
Umore I \u003d 0,5 3 0,9 1463,56 \u003d 1975,8 kNm;
La stabilità al ribaltamento è assicurata se la condizione
M o< М уд I
M o \u003d 147,6< М уд I =1975,8 кНм
La stabilità del ribaltamento è garantita.
2.7. Calcolo della resistenza della struttura di fondazione
In connessione con l'uso di un tipico progetto di fondazione, viene eliminata la necessità di prove di resistenza.
Progettazione di fondazioni su pali.
La scelta dei disegni di pile e griglia.
Secondo lo schema in Fig. a pagina 11 dell'attività, i carichi e i momenti verticali e orizzontali vengono trasferiti dalla colonna alla fondazione. Pertanto, è consigliabile considerare che il numero minimo di pali sia 4 E. Quindi, in ogni palo, l'impatto del momento è insignificante. Il momento esterno è percepito da una coppia di forze. (vedi diagramma)
 ∆N M =
∆N M =
3d c6d (d è la dimensione della sezione trasversale del palo). Con carichi posteriori (vedi 1.3), è consigliabile prendere c = 3d, d = 0,35 m (Sezione minima dei pali pieni in cemento armato 20 × 20 cm)
Quindi le dimensioni della griglia in termini di a p \u003d b p \u003d 3d + d + 2 × 0,15 m
a p \u003d in p \u003d 3 0,35 + 0,35 + 2 0,15 \u003d 1,7 m
Per un inserimento affidabile dei pali in una griglia in cemento armato, il rinforzo è esposto alle estremità superiori dei pali in una sezione con una lunghezza di 0,4 m (vedi diagramma). Dov'è l'altezza della griglia consigliata h p \u003d 0,6 ÷ 0,8 m
h p ≈ 0,6 ÷ 0,8 m
I tipici pali in cemento armato con una sezione di 35 × 35 cm possono essere lunghi da 8 m (vedi pag. 10.11).
In alcuni casi, la loro lunghezza arriva fino a 16 m, se necessario è possibile utilizzare pali più lunghi con una grande sezione trasversale.
Nel nostro caso prendiamo una fondazione su pali approssimativa con le dimensioni mostrate nello schema di Fig. 3, dove possono essere applicati pali di fabbrica lunghi 8 ÷ 16 m.
Accettiamo pali lunghi 9 metri. Il volume della griglia in cemento armato
V p = a p × b h p
V p \u003d 1,7 × 1,7 × 0,6 \u003d 1,734 m 3
Volume dei pali in cemento armato
V sv \u003d 4 0,35 0,35 14 \u003d 6,86 m3
Peso della griglia F vp = γ cemento armato V p
Peso del palo F v c = γ cemento armato V sv
γ cemento armato 24 kN / m 3 - peso specifico del cemento armato
F vp = 24 1.734 = 41.616 kN
F v c \u003d 24 6,86 \u003d 164,64 kN
Determinazione della capacità portante del palo
a) a terra
Le estremità inferiori dei pali non poggiano sulla roccia, ma su rocce sedimentarie sciolte (vedi compito pag. 17), quindi i pali sono sospesi.
La capacità portante dei pali sospesi F d è determinata secondo SNiP (vedi pag. 14)
F d = γ c (γ c R R A +uΣγ c f f i h i)
Utilizziamo allora i pali battuti
γ s, γ s R , γ s f - i coefficienti di affidabilità possono essere uguali a 1.
R è la resistenza di progetto del terreno sotto l'estremità inferiore del palo (vedi pagina 37).
f i - resistenza di progetto del terreno dovuta all'attrito sulla superficie laterale del palo (vedi p.38).
A, u - l'area della sezione trasversale della pila e il suo perimetro.
A \u003d d 2; uu = 4d
A \u003d 0,35 × 0,35 \u003d 0,1225 m2
u \u003d 4 0,35 \u003d 1,4 m.
I valori di R e f i dovrebbero essere presi dalle tabelle p.37, 38 per terreni ad una certa profondità.
È conveniente dividere la lunghezza del palo in segmenti ℓ i 2 m, come mostrato nel diagramma e mostrare lì i valori R e f i, che vengono poi sostituiti nella formula di calcolo per il calcolo di F d

Il valore di R per il terreno del 2° strato a livello delle estremità inferiori dei pali.
Valori f i a livello della metà dei segmenti h i per terreni alle corrispondenti profondità z i
F d =1653 0,1225+1,4(1,9 30+2 38+1,4 30,4+1,4 32,1+1,3 33,225+1,0 33,55+1,0 34,48+1,0 35,28+1,0 36,08+1,0 36,88+1,0 37,68)= 871,2 kN
Il momento sbandante limite, il cui eccesso, secondo il calcolo, porta al ribaltamento della nave. Per determinare O. m, vengono utilizzati i diagrammi di stabilità. O.m. con la sua statica. action è uguale a max, l'ordinata del grafico è statica. stabilità costruita sulla scala dei momenti. Om nel caso delle dinamo, l'azione (improvvisa) su una nave in posizione diritta, è determinata: 1) secondo il diagramma statico. stabilità dalla condizione di uguaglianza delle zone d'ombra; 2) secondo il diagramma della dinamica, della stabilità, costruito sulla scala delle spalle, disegnando una tangente dall'inizio. coordinate. L'ordinata della tangente con un'ascissa pari a 1 rad mostra la spalla / opr, che, moltiplicata per la gravità della nave (pari al prodotto del suo spostamento volumetrico per il peso specifico dell'acqua), determina il momento richiesto.
"TOPPING TORQUE" su Internet:
Scherzi marini
Due marinai si incontrano. Abbiamo parlato di tutto. Qui uno dice all'altro:
- Parliamo da mezz'ora e tu mi mostri sempre la lingua! Qual è il problema?
- Non ti mostro la lingua, è il fegato che mi spunta dopo le feste.
- In contatto con 0
- Google Plus 0
- OK 0
- Facebook 0