TIPI DI INGRANAGGI
Essenzialmente, gli ingranaggi sono dispositivi che trasmettono il movimento rotatorio da un asse all'altro. Alcuni tipi di ingranaggi possono effettuare anche movimenti traslatori. Nell'industria esistono dozzine di tipi diversi di ingranaggi, solo alcuni dei quali vengono mostrati Qui.
INGRANAGGI CILINDRICI
Gli ingranaggi cilindrici funzionano su alberi i cui assi sono paralleli
Uno degli effetti collaterali delle coppie di ingranaggi cilindrici è che l'asse di uscita ruota nella direzione opposta rispetto all'asse di ingresso, un effetto che può essere chiaramente visto nell'animazione
INGRANAGGI CONICI
Gli ingranaggi conici funzionano su assi non paralleli. Gli ingranaggi conici possono essere realizzati appositamente per assi con quasi qualsiasi angolazione

INGRANAGGI A VITE SENZA FINE
Un ingranaggio a vite senza fine (o vite) può essere pensato come una trasmissione a dente singolo
Gli ingranaggi a vite senza fine hanno alcune proprietà speciali che li rendono distinguibili dagli altri ingranaggi. In primo luogo, possono raggiungere marce molto elevate prodotte in un unico movimento. Poiché la maggior parte degli ingranaggi a vite senza fine hanno un solo dente caricato, il rapporto di trasmissione è semplicemente il numero di denti per connessione dell'ingranaggio. Ad esempio, una coppia di ingranaggi a vite senza fine accoppiati con 40- a trentadue denti Il riduttore elicoidale ha un rapporto di 40:1. In secondo luogo, gli ingranaggi a vite senza fine hanno un attrito molto più elevato (e un’efficienza inferiore) rispetto ad altri tipi di ingranaggi. Questo perché il profilo dei denti degli ingranaggi a vite senza fine scivola costantemente contro i denti degli ingranaggi accoppiati. Questo attrito diventa tanto maggiore quanto maggiore è il carico sulla trasmissione. Infine, l'ingranaggio a vite senza fine non può funzionare al contrario. Nell'animazione seguente, l'ingranaggio a vite sull'asse verde è azionato dall'ingranaggio blu sull'asse rosso. Ma se si utilizza l'asse rosso come asse motore, gli ingranaggi a vite senza fine non funzioneranno. Questa proprietà di trasmissione può essere utilizzata per fermare - bloccare qualcosa in un determinato posto senza arretrare, ad esempio la porta di un garage.

TRASMISSIONI LINEARI
È un mezzo per convertire il movimento rotatorio da un asse di rotazione o pignone in movimento traslatorio di una cremagliera e un pignone. L'ingranaggio ruota e spinge la cremagliera in avanti mentre i denti dell'ingranaggio si muovono al suo interno. Regolabile ad esempio, meno denti sull'ingranaggio conduttore e più denti sulla cremagliera. il movimento nelle cremagliere sarà proporzionale al numero di denti dell'ingranaggio

TRASMISSIONE DIFFERENZIALE
Differenzialeè un dispositivo meccanico che trasmette la coppia da una sorgente a due consumatori indipendenti in modo tale che le velocità angolari di rotazione della sorgente e di entrambi i consumatori possano essere diverse l'una rispetto all'altra. Questa trasmissione della coppia è possibile attraverso l'uso di un cosiddetto meccanismo planetario. Nell'industria automobilistica, il differenziale è uno degli organi chiave della trasmissione. Serve innanzitutto a trasmettere la coppia dal cambio alle ruote dell'asse motore.

Perché hai bisogno di un differenziale per questo? In ogni angolo, il percorso di una ruota su un asse che si muove lungo un raggio corto (interno) è inferiore al percorso di un'altra ruota sullo stesso asse che si muove lungo un raggio lungo (esterno). Di conseguenza, la velocità angolare di rotazione della ruota interna deve essere inferiore alla velocità angolare di rotazione della ruota esterna. Nel caso di un asse non motore, questa condizione è abbastanza semplice da soddisfare, poiché entrambe le ruote non possono essere collegate tra loro e ruotare indipendentemente. Ma se l'asse è motore, è necessario trasmettere la coppia contemporaneamente a entrambe le ruote (se si trasmette la coppia a una sola ruota, la capacità di controllare l'auto secondo concetti moderni sarà molto scarsa). Se le ruote dell'asse motore fossero collegate rigidamente e la coppia fosse trasferita ad un unico asse di entrambe le ruote, l'auto non riuscirebbe a girare normalmente, poiché le ruote, avendo uguale velocità angolare, tenderebbero a percorrere lo stesso percorso durante la corsa. giro. Il differenziale consente di risolvere questo problema: trasmette la coppia agli assi separati di entrambe le ruote (semiassi) attraverso il suo meccanismo planetario con qualsiasi rapporto delle velocità angolari di rotazione dei semiassi. Di conseguenza, l'auto può muoversi e controllare normalmente sia su un percorso rettilineo che in curva.
TRASMISSIONE CON CAMBIO DI MARCIA
L'anello di trascinamento, in combinazione con una coppia di ingranaggi intermedi, non fissi sul proprio asse, hanno la funzione di accendere e spegnere gli ingranaggi.

L'animazione mostra lavoro ingranaggi, per disinnestare o/o per garantire che gli ingranaggi si innestino con l'ausilio di un ingranaggio intermedio. Gli anelli mobili sono mostrati in rosso. ,Gli assi sono collegati ad un asse grigio con dischi bianchi che scorrono lungo le scanalature dell'asse principale. L'anello bianco di guida ruota insieme agli assi. All'inizio , l'anello mobile è disabilitato perché gli ingranaggi grigio scuro e verde non sono innestati. L'anello mobile innesta quello verde e mette così in movimento l'ingranaggio blu. L'anello mobile non utilizza denti, ma utilizza quattro perni conici, c'è un gioco significativo tra l'anello e i perni. Ciò consente di collegare l'anello al minimo o quando gli ingranaggi ruotano a velocità diverse
ROTORE REGOLABILE

Lezione n. 16
Materiale presentato
Domande di autotest
1. Elenca esempi di parti con superfici di configurazioni complesse.
2. Quali tipi di superfici vengono utilizzati durante la progettazione di parti con configurazioni superficiali complesse?
3. Fornire metodi per elaborare superfici di configurazioni complesse.
4. Cos'è elaborazione della fotocopiatrice?
5. Quali tipi fotocopiatrici utilizzato nella produzione?
1. Studia la gamma di parti complesse prodotte (riparate) presso l'azienda di tua scelta.
2. Elaborare un percorso tecnologico per la loro elaborazione.
3. Identificare strumenti e metodi per l'elaborazione di superfici specifiche di configurazioni complesse.
LAVORAZIONE DELLE SUPERFICI DEGLI INGRANAGGI
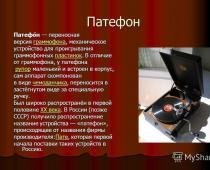
Nelle trasmissioni delle macchine moderne sono ampiamente utilizzate ruote dentate di varie forme, dimensioni e profili (Fig. 16.1). Più comune cilindrico ingranaggi con denti diritti (Fig. 16.1a) e obliqui (Fig. 16.1b). Il collegamento di due denti obliqui con angoli di inclinazione opposti sul cerchio di una ruota cilindrica è un treno di ingranaggi con gallone(a spina di pesce) denti.
Riso. 16.1. Tipi di ingranaggi
Nella fig. 16.1v presentato conico trasmissione con assi che si intersecano e l'angolo di incontro degli assi può essere qualsiasi. Le ruote coniche possono avere denti dritti, obliqui e curvi.
Nella fig. 16.1d mostra una trasmissione ad ingranaggi ad assi incrociati, composta da due ruote dentate con denti elicoidali. Nella fig. 16.1d mostra un altro schema di trasmissione con assi incrociati - ingranaggio a vite senza fine, differiscono da quelli sopra elencati in quanto un elemento di trasmissione è una vite (senza fine), e l'altro è un ingranaggio con dente sagomato che si innesta con le spire della vite.
Nella fig. 16.1e è mostrato trasmissione a pignone e cremagliera, un elemento dei quali è un ingranaggio con un dente diritto o obliquo, e l'altro è una cremagliera, che può essere immaginata come un ingranaggio con un numero infinitamente grande di denti. La coppia pignone-cremagliera trasmette il moto come da un ingranaggio a una cremagliera,
e viceversa.
Nella fig. 16.1g mostra il diagramma trasmissione delle onde, basato sulla trasmissione del moto dovuta alla deformazione dell'onda progressiva di uno degli ingranaggi. Questa trasmissione è costituita da un supporto 3 con due rulli che ruotano liberamente su assi fissati nel supporto, una ruota dentata rigida fissa 1 con denti interni e una ruota flessibile rotante 2 con denti esterni. Un ingranaggio rigido è collegato alla scatola degli ingranaggi. Un ingranaggio flessibile è realizzato sotto forma di un vetro con una parete sottile e facilmente deformabile, oppure sotto forma di un anello liberamente deformabile.
I meccanismi moderni utilizzano ingranaggi con un profilo del dente delineato da una curva ad evolvente. In alcuni casi vengono utilizzati ingranaggi con ingranaggi Novikov, la cui differenza principale sono i profili dei denti circolari convessi e concavi.
Gli attuali GOST stabiliscono 12 gradi di precisione per ingranaggi cilindrici e ingranaggi, con i gradi indicati in ordine decrescente di precisione. Come base viene preso il 7° grado di precisione, corrispondente alla 7a qualifica. Per ogni grado di precisione vengono stabiliti degli standard: precisione cinematica della ruota; funzionamento regolare della ruota; contatto con i denti; gioco laterale.
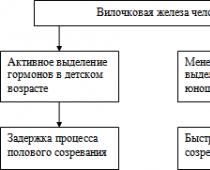
Gli indicatori di precisione cinematica sono presentati in Fig. 16.2.
Le norme di precisione cinematica determinano il valore dell'errore più grande nell'angolo di rotazione della ruota dentata per giro quando è impegnata con la ruota di precisione. Questo errore si verifica durante il taglio degli ingranaggi a causa di errori nella posizione relativa del pezzo della ruota in lavorazione e dell'utensile da taglio, nonché a causa dell'errore cinematico della dentatrice. Un indicatore di precisione cinematica è errore cinematico massimo (Fig. 16.2a).
L'errore cinematico può essere stimato errore massimo accumulato del passo circonferenziale, che è l'errore più grande nella posizione relativa di due profili di denti qualsiasi con lo stesso nome lungo la stessa circonferenza della ruota (Fig. 16.2b).
L'indicatore di errore cinematico, designato come fluttuazione della lunghezza della normale comune, cioè. la dimensione tra la lunghezza maggiore e quella minore della normale comune nella stessa ruota (Fig. 16.2c).
La velocità di funzionamento regolare di un ingranaggio determina la componente dell'errore totale negli angoli di rotazione dell'ingranaggio, che si ripete molte volte per giro della ruota (Fig. 16.2d). Un indicatore del buon funzionamento delle ruote è errore ciclico, che è il valore medio dell'oscillazione dell'errore cinematico della ruota dentata su tutti i cicli per giro della ruota. Il buon funzionamento degli ingranaggi influisce sulla silenziosità e sulla durata degli ingranaggi (Fig. 16.2e).
Errore del profilo caratterizza la distanza la distanza normale tra due profili teorici di un dente della ruota, limitando il profilo reale all'interno della sua area di lavoro (Fig. 16.2f).
Riso. 16.2. Indicatori di precisione cinematica della trasmissione ad ingranaggi
Gli standard di contatto dei denti determinano la precisione dei denti accoppiati nell'ingranaggio. Contatto puntualeè chiamata la parte della superficie laterale del dente della ruota su cui sono presenti tracce del suo contatto con i denti della ruota accoppiata dopo la rotazione dell'ingranaggio durante una leggera frenata (Fig. 16.2g). Lo standard di precisione è determinato dalle dimensioni relative della zona di contatto (in percentuale):
1) lungo la lunghezza del dente - il rapporto tra la distanza tra i punti estremi dei segni di contatto meno gli spazi c eccedenti la dimensione del modulo rispetto alla lunghezza totale B del dente (vedere Fig. 16.2g):
2) per altezza del dente - il rapporto tra l'altezza media del punto di contatto lungo l'intera lunghezza del dente e l'altezza di lavoro del dente:
Un esempio di standard per le dimensioni delle patch di contatto è riportato nella tabella. 16.1.
Gioco lateraleè lo spazio tra i denti delle ruote accoppiate in una trasmissione, che garantisce la rotazione libera di una delle ruote mentre la seconda ruota è ferma. Il gioco laterale è determinato in una sezione perpendicolare alla direzione dei denti, in un piano tangente ai cilindri principali.
È indicato lo spazio laterale garantito.
Per le ruote dentate della trasmissione sono installati sei tipi di accoppiamenti: A, B, C, D, E, H e otto tipi di tolleranza per il gioco laterale, indicati nell'ordine
Tabella 16.1
Standard delle dimensioni delle patch di contatto (%%) per ruote cilindriche
le sue lettere ascendenti: h, d, c, b, a, z, y, x.
Per le ruote coniche e gli ingranaggi a vite senza fine vengono stabiliti standard di precisione speciali.
16.2. Metodi di base per la lavorazione dei denti di ruote cilindriche e coniche.
La scelta del metodo per la lavorazione degli ingranaggi dipende direttamente dallo standard di precisione stabilito dei loro vari elementi, nonché dai requisiti di base degli ingranaggi durante il loro funzionamento. Da questo punto di vista le trasmissioni ad ingranaggi possono essere suddivise nei seguenti gruppi: 1) trasmissioni di potenza ad alta potenza ed alte velocità; il requisito principale è garantire un'elevata efficienza; 2) alimentare trasmissioni industriali e di trasporto a velocità medie; il requisito principale è l'affidabilità e il buon funzionamento; 3) trasmissioni di potenza nell'industria delle macchine utensili; il requisito principale è la costanza del rapporto di trasmissione e il buon funzionamento; 4) trasmissioni nell'industria automobilistica; il requisito principale è la scorrevolezza e la facilità di movimento; silenziosità; 5) trasmissioni cinematiche negli strumenti di precisione; il requisito principale è la costanza dei rapporti di trasmissione, l'assenza di gioco. I gradi di precisione stabiliti da GOST tengono conto di queste condizioni, consentendo indicatori tecnici elevati in una direzione e bassi nell'altra.
Gli ingranaggi vengono lavorati su una varietà di macchine per la lavorazione degli ingranaggi. I denti delle ruote vengono tagliati in due modi : copiatura(Fig. 16.3a, b) e correre dentro(piegandosi; Fig. 16.3c). Durante la copiatura, lo strumento viene modellato in una cavità tra i denti e quindi lavorato. In questo caso il profilo dell'utensile viene copiato sulla superficie lavorata.
Il taglio degli ingranaggi con il metodo a copia può essere eseguito: mediante taglio sequenziale di ciascun dente della ruota con un disco modulare o una fresa a dito su una fresatrice universale; scalpellatura simultanea di tutti i denti della ruota; estrazione simultanea di tutti i denti della ruota; allungamento circolare. Il metodo della copiatura viene utilizzato principalmente per la produzione di ingranaggi a bassa precisione.
Un modo moderno, accurato e produttivo per produrre ingranaggi è quello di tagliare i denti facendo rotolare una fresa circolare
Riso. 16.3. Modelli di taglio dei denti
taglierina, taglierina a cremagliera (pettine), frese per ingranaggi, testa di taglio, rotolamento con rulli dentati.
Il metodo di laminazione prevede la formazione dei denti sul pezzo mediante rotazione congiunta coordinata (rotolamento) dell'utensile da taglio e del pezzo. Pertanto, durante la dentatura degli ingranaggi (Fig. 16.4), i bordi taglienti laterali diritti dei denti della taglierina, che hanno una forma trapezoidale nella sezione assiale, toccano alternativamente il dente da tagliare. Considerando le successive posizioni dei denti della fresa, vediamo che il profilo della cavità si forma gradualmente ed è costituito da tanti tratti rettilinei formati dai denti della fresa. Questi tratti rettilinei si sovrappongono e praticamente non formano una linea spezzata, ma curvilinea (evoluta).
Riso. 16.4. Rottamazione nei denti delle ruote
Vengono utilizzati ingranaggi con profilo dei denti asimmetrico.
Parametri dell'ingranaggio evolvente:
- M- modulo ruota. Il modulo di impegno è una quantità lineare in π volte inferiore al passo circonferenziale P o al rapporto del passo lungo qualsiasi cerchio concentrico dell'ingranaggio π , cioè il modulo è il numero di millimetri di diametro primitivo per dente. Le ruote scure e chiare hanno lo stesso modulo. Il parametro più importante, standardizzato, è determinato dal calcolo della resistenza degli ingranaggi. Più la trasmissione è caricata, maggiore è il valore del modulo. Tutti gli altri parametri sono espressi attraverso di esso. Il modulo è misurato in millimetri, calcolato con la formula:
- z- numero di denti della ruota
- P- passo del dente (contrassegnato in lilla)
- D- diametro del cerchio primitivo (contrassegnato in giallo)
- d.a- diametro del cerchio dei vertici della ruota scura (segnato in rosso)
- d b- diametro del cerchio principale - evolvente (contrassegnato in verde)
- d f- diametro del cerchio delle depressioni della ruota scura (contrassegnato in blu)
- h aP + h fP- altezza del dente scuro della ruota, x+h aP +h fP- altezza dente ruota leggera
Nell'ingegneria meccanica sono accettati determinati valori del modulo ingranaggio M per comodità di produzione e sostituzione di ingranaggi, che siano numeri interi o numeri con una frazione decimale: 0,5 ; 0,7 ; 1 ; 1,25 ; 1,5 ; 1,75 ; 2 ; 2,5 ; 3 ; 3,5 ; 4 ; 4,5 ; 5 e così via finché 50 . (per maggiori dettagli vedere Ruote dentate GOST 9563-60. Moduli)
Altezza della testa del dente - h aP e l'altezza dello stelo del dente - h fP- nel caso del cosiddetto ingranaggio zero (realizzato senza offset, un ingranaggio con denti "zero")(lo spostamento della cremagliera di taglio, che taglia i denti, più vicino o più lontano al pezzo da lavorare, e lo spostamento più vicino al pezzo da lavorare è chiamato compensazione negativa, e viene chiamato lo spostamento più lontano dal pezzo. positivo) corrispondono al modulo M nel seguente modo: hap = m; hfP = 1,25 m, questo è:
h f P h un P = 1 , 25 (\displaystyle \mathbf ((\frac (h_(fP))(h_(aP)))=1.25) )Da questo si ricava l'altezza del dente H(non indicato in figura):
h = h f P + h a P = 2, 25 m (\displaystyle \mathbf (h=(h_(fP))+(h_(aP))=2,25m) )In generale, dalla figura è chiaro che il diametro del cerchio dei vertici d.a maggiore del diametro del cerchio delle depressioni d f raddoppiare l'altezza dei denti H. Sulla base di tutto ciò, se è necessario determinare praticamente il modulo M ingranaggio senza avere i dati necessari per i calcoli (ad eccezione del numero di denti z), allora è necessario misurare con precisione il suo diametro esterno d.a e dividi il risultato per il numero di denti z più 2:
m = d un z + 2 (\displaystyle \mathbf (m=(\frac (d_(a))(z+2))) )Linea longitudinale del dente
Gli ingranaggi si classificano in base alla forma della linea longitudinale del dente in:
- denti dritti
- elicoidale
- gallone
Ruote dentate
Gli ingranaggi cilindrici sono il tipo più comune di ingranaggi. I denti si trovano su piani radiali e la linea di contatto dei denti di entrambi gli ingranaggi è parallela all'asse di rotazione. In questo caso, anche gli assi di entrambi gli ingranaggi devono essere posizionati rigorosamente paralleli. Gli ingranaggi cilindrici hanno il costo più basso, ma, allo stesso tempo, la coppia massima di tali ruote è inferiore a quella degli ingranaggi elicoidali e chevron.
Ruote elicoidali
Gli ingranaggi elicoidali sono una versione migliorata degli ingranaggi cilindrici. I loro denti si trovano ad angolo rispetto all'asse di rotazione e la loro forma fa parte di una linea elicoidale.
- Vantaggi:
- L'innesto di tali ruote avviene in modo più fluido rispetto ai denti dritti e con meno rumore.
- L'area di contatto è aumentata rispetto ad un ingranaggio cilindrico, quindi anche la coppia massima trasmessa dalla coppia di ingranaggi è maggiore.
- I seguenti fattori possono essere considerati svantaggi delle ruote elicoidali:
- Quando funziona un ingranaggio elicoidale, si genera una forza meccanica diretta lungo l'asse, che richiede l'uso di cuscinetti reggispinta per installare l'albero;
- Un aumento dell'area di attrito dei denti (che provoca ulteriori perdite di potenza dovute al riscaldamento), compensato dall'uso di lubrificanti speciali.
In generale, gli ingranaggi elicoidali vengono utilizzati in meccanismi che richiedono la trasmissione di una coppia elevata ad alte velocità o che presentano rigide restrizioni sul rumore.
Ruote Chevron
L'invenzione dell'ingranaggio Chevron viene spesso attribuita ad Andre Citroen, ma in realtà acquistò solo il brevetto per un design più avanzato inventato da un meccanico polacco autodidatta. La dentatura di tali ruote è realizzata a forma di lettera “V” (oppure è ottenuta unendo due ruote elicoidali a denti contrapposti). Le trasmissioni basate su tali ingranaggi sono solitamente chiamate "chevron".
Le ruote Chevron risolvono il problema della forza assiale. Le forze assiali di entrambe le metà di tale ruota sono reciprocamente compensate, quindi non è necessario installare gli alberi sui cuscinetti reggispinta. In questo caso la trasmissione è autoallineante in senso assiale, motivo per cui nei riduttori con ruote chevron uno degli alberi è montato su supporti flottanti (solitamente su cuscinetti a rulli cilindrici corti).
Ingranaggi interni
Quando ci sono rigide restrizioni sulle dimensioni, nei meccanismi planetari, nelle pompe ad ingranaggi con ingranaggi interni, nell'azionamento della torretta del serbatoio, vengono utilizzate ruote con una corona dentata tagliata dall'interno. Le ruote motrici e motrici ruotano in una direzione. In tale trasmissione ci sono meno perdite per attrito, ovvero maggiore efficienza.
Ruote di settore
Una ruota a settori fa parte di qualsiasi tipo di ruota normale. Tali ruote vengono utilizzate nei casi in cui il collegamento non ha bisogno di ruotare di un giro completo e quindi è possibile risparmiare sulle sue dimensioni.
Ruote con denti circolari
Una trasmissione basata su ruote con denti circolari (trasmissione Novikov) ha prestazioni di guida ancora più elevate di quelle elicoidali: elevata capacità di carico di innesto, elevata scorrevolezza e funzionamento silenzioso. Tuttavia, hanno un’applicazione limitata a causa della ridotta efficienza e durata, a parità di condizioni; tali ruote sono notevolmente più difficili da produrre. La loro linea di denti è un cerchio di raggio, selezionato per determinati requisiti. Il contatto delle superfici dei denti avviene in un punto della linea di impegno, situato parallelamente agli assi delle ruote.
Concetti e termini relativi alla geometria e alla cinematica degli ingranaggi sono standardizzati. Gli standard stabiliscono termini, definizioni e designazioni, nonché metodi per il calcolo dei parametri geometrici.
Viene chiamato il più piccolo di una coppia di ingranaggi ingranaggio, e altro ancora ruota. Ai parametri delle marce viene assegnato un indice 1 e ai parametri delle ruote viene assegnato un indice 2 (FIG 5.8).
Negli ingranaggi si distinguono le seguenti superfici o cerchi: iniziale, principale, punte dei denti, cavità dei denti, passo.
Iniziale( e ) sono quei cerchi (superfici) che rotolano gli uni sugli altri senza strisciare, cioè sono baricentri nel moto relativo delle ruote. I parametri relativi ai cerchi iniziali sono indicati con l'indice w.
Divisione cerchio (superficie) è un cerchio per il quale il modulo è standard. Negli ingranaggi non corretti tagliati da una cremagliera imparziale, i cerchi iniziale e primitivo coincidono. Ai parametri relativi al cerchio primitivo o alla superficie non viene assegnato un indice aggiuntivo.
Inoltre sono presenti indici relativi a:
b- alla superficie principale o al cerchio;
a – alla superficie o circonferenza delle sommità (teste) dei denti;
f – alla superficie o alla circonferenza delle cavità dei denti (gambe).
L’ingranamento delle ruote dentate è caratterizzato da:
E - i numeri dei denti degli ingranaggi e delle ruote;
Interasse (distanza tra i centri dei cerchi iniziali);
p – passo del dente lungo la circonferenza primitiva (parte della circonferenza primitiva racchiusa tra gli stessi punti di due denti adiacenti);
s – spessore del dente lungo la circonferenza primitiva (arco della circonferenza primitiva contenente un dente);
e – larghezza della cavità (arco di circonferenza primitiva tra due denti adiacenti);
Altezza del gambo del dente (parte del profilo del dente all'interno del cerchio primitivo);
L'altezza della testa del dente (la parte del profilo del dente che sporge oltre il cerchio primitivo);
b – larghezza del dente;
Angolo di impegno o angolo del profilo della cremagliera;
Come si può vedere dalla Fig. 5.8, il passo di innesto è pari a
Quando si trasmette il movimento continuo alle ruote accoppiate, il passo di innesto deve essere lo stesso per entrambe le ruote. Quindi il rapporto tra il numero di denti e i diametri delle circonferenze primitive delle ruote sarà:
Quindi (5.8)
Nel determinare il passo, la formula (5.8) include il numero trascendente. Ciò rende difficile selezionare le dimensioni degli ingranaggi durante la progettazione. Pertanto, per determinare le dimensioni delle ruote, viene preso il parametro principale che determina queste dimensioni modulo di coinvolgimento , definito come il rapporto tra il passo del cerchio primitivo e il numero e arrotondato al valore standard.
Successivamente si determinano i diametri delle circonferenze primitive, espressi in termini di modulo, come:
Altezza della testa del dente
Altezza delle gambe
e, come si vede dalla (5.12), l'altezza della testa sarà maggiore dell'entità dello spostamento assiale, che per le ruote standard è definito come
Diametro del cerchio della punta del dente
Diametro del cerchio delle depressioni
Lungo la circonferenza primitiva, lo spessore del dente è quindi pari alla larghezza della cavità
La distanza dal centro sarà
Ul'janovsk
introduzione
1. Attrezzo, classificazione…………………4
2.Trasmissione ad ingranaggi, classificazione................................................................8
3. L'evolvente e le sue proprietà………………………………9
4.Metodi di taglio degli ingranaggi………………………11
5.Rifinitura del profilo del dente. Correzione della marcia…………12
Conclusione
Elenco della letteratura usata
introduzione
Il rapido sviluppo della scienza e della tecnologia porta all'emergere di nuovi materiali, nuove soluzioni tecnologiche che consentono di creare progetti fondamentalmente nuovi, ma le disposizioni metodologiche fondamentali rimangono invariate.
Nell'XI secolo particolare attenzione fu rivolta all'industria meccanica e aeronautica; a questo proposito vorrei soffermarmi sugli elementi di uso generale utilizzati in queste industrie, vale a dire gli ingranaggi.
L'abstract fornisce una definizione di trasmissione a ingranaggi, ne discute la classificazione e un metodo per calcolare i parametri geometrici degli ingranaggi.
Questo lavoro descrive anche lo scopo della trasmissione ad ingranaggi e fornisce le caratteristiche della trasmissione nei meccanismi.
Ruota dentata, classificazione.
Ingranaggio, ingranaggio: la parte principale di una trasmissione ad ingranaggi sotto forma di un disco con denti su una superficie cilindrica o conica che ingrana con i denti di un altro ingranaggio. Nell'ingegneria meccanica, è consuetudine chiamare un ingranaggio piccolo con un numero minore di denti un ingranaggio e uno grande una ruota. Tuttavia, tutti gli ingranaggi sono spesso chiamati ingranaggi.
Fig. 1. Ingranaggio.
Gli ingranaggi vengono solitamente utilizzati in coppia con un numero diverso di denti per convertire la coppia e la velocità degli alberi di ingresso e di uscita. La ruota a cui viene fornita la coppia dall'esterno è chiamata ruota motrice, mentre la ruota da cui viene rimossa la coppia è chiamata ruota condotta. Se il diametro della ruota motrice è inferiore, la coppia della ruota condotta aumenta a causa di una diminuzione proporzionale della velocità di rotazione e viceversa. In base al rapporto di trasmissione, un aumento della coppia causerà una diminuzione proporzionale della velocità angolare di rotazione dell'ingranaggio condotto e il loro prodotto - potenza meccanica - rimarrà invariato. Questa relazione è valida solo per il caso ideale, che non tiene conto delle perdite per attrito e di altri effetti caratteristici dei dispositivi reali.
A) Profilo trasversale del dente
Il profilo dei denti delle ruote ha solitamente una forma laterale evolvente. Esistono tuttavia ingranaggi con profilo del dente circolare (ingranaggio Novikov con una e due linee di innesto) e con uno cicloidale. Inoltre, i meccanismi a cricchetto utilizzano ingranaggi con un profilo dei denti asimmetrico.
Parametri dell'ingranaggio:
m - modulo ruota. Il modulo di impegno è una quantità lineare in π volte inferiore al passo circonferenziale P o al rapporto del passo lungo qualsiasi cerchio concentrico dell'ingranaggio π , cioè il modulo è il numero di millimetri di diametro per dente. Le ruote scure e chiare hanno lo stesso modulo. Il parametro più importante, standardizzato, è determinato dal calcolo della resistenza degli ingranaggi. Più la trasmissione è caricata, maggiore è il valore del modulo.
Tutti i parametri geometrici di un ingranaggio sono espressi attraverso il suo modulo:
1. Modulo dente m= = .
2. Altezza dei denti h = 2,25M.
3. Altezza della testa del dente H =m.
4. Altezza dello stelo del dente H = 2,25M.
5. Diametro del cerchio primitivo d=mz.
6. Diametro del cerchio delle alette D = d + 2H =d+ 2m=m(z + 2).
7. Diametro del cerchio delle depressioni d = d +2 h =d+2m=m(z +2).
8. Gioco radiale tra gli anelli di accoppiamento Con=0,25T.
9. Distanza dal centro UN =
 .
.
10. Passo dei denti p=πm.
11.Spessore del dente S = 0,5p= .
12. Larghezza delle depressioni l= 0,5p= .
13. Larghezza dell'anello dentato (lunghezza del dente) b≈(6…8).M
14. Diametro del mozzo D ≈ (1,6…2)D .
15.Lunghezza del mozzo l = 1,5D .
16.Spessore del bordo δ ≈ (2,5…4)M.
17. Angolo del profilo, angolo di innesto α = α = 20 .
18. Diametro primitivo, diametro iniziale d = d = mz.
19. Diametro principale. d = d cosα

Fig.2 Parametri dell'ingranaggio.
Nell'ingegneria meccanica, per comodità di produzione e sostituzione degli ingranaggi, sono accettati determinati valori del modulo dell'ingranaggio m, che sono numeri interi o numeri con una frazione decimale: 0,5; 0,7; 1; 1,25; 1,5; 1,75; 2; 2,5; 3; 3,5; 4; 4,5; 5 e così via fino a 50.
B) Linea longitudinale del dente
Gli ingranaggi si classificano a seconda della forma della linea longitudinale del dente in: a denti diritti, elicoidali, a zigzag.
B) Ingranaggi cilindrici
Gli ingranaggi cilindrici sono il tipo più comune di ingranaggi. I denti si trovano su piani radiali e la linea di contatto dei denti di entrambi gli ingranaggi è parallela all'asse di rotazione. In questo caso, anche gli assi di entrambi gli ingranaggi devono essere posizionati rigorosamente paralleli. Gli ingranaggi cilindrici hanno il costo più basso, ma, allo stesso tempo, la coppia massima di tali ruote è inferiore a quella degli ingranaggi elicoidali e chevron.
C) Ruote elicoidali
Gli ingranaggi elicoidali sono una versione migliorata degli ingranaggi cilindrici. I loro denti si trovano ad angolo rispetto all'asse di rotazione e la loro forma fa parte di una spirale.
Vantaggi:
L'innesto di tali ruote è più dolce di quello dei denti dritti e con meno rumore;
L'area di contatto è aumentata rispetto ad un ingranaggio cilindrico, quindi anche la coppia massima trasmessa dalla coppia di ingranaggi è maggiore.
Quando funziona un ingranaggio elicoidale, si genera una forza meccanica diretta lungo l'asse, che richiede l'uso di cuscinetti reggispinta per installare l'albero;
Un aumento dell'area di attrito dei denti (che provoca ulteriori perdite di potenza dovute al riscaldamento), compensato dall'uso di lubrificanti speciali.
In generale, gli ingranaggi elicoidali vengono utilizzati in meccanismi che richiedono la trasmissione di una coppia elevata ad alte velocità o che presentano rigide restrizioni sul rumore.
D) Ruote Chevron
La dentatura di tali ruote è realizzata a forma di lettera “V” (oppure è ottenuta unendo due ruote elicoidali a denti contrapposti). Le trasmissioni basate su tali ingranaggi sono solitamente chiamate "chevron".
Le ruote Chevron risolvono il problema della forza assiale. Le forze assiali di entrambe le metà di tale ruota sono reciprocamente compensate, quindi non è necessario installare gli alberi sui cuscinetti reggispinta. In questo caso la trasmissione è autoallineante in senso assiale, motivo per cui nei riduttori con ruote chevron uno degli alberi è montato su supporti flottanti (solitamente su cuscinetti a rulli cilindrici corti).
D) Ingranaggi con dentatura interna
Quando ci sono rigide restrizioni sulle dimensioni, nei meccanismi planetari, nelle pompe ad ingranaggi con ingranaggi interni, nell'azionamento della torretta del serbatoio, vengono utilizzate ruote con una corona dentata tagliata dall'interno. Le ruote motrici e motrici ruotano in una direzione. In tale trasmissione ci sono meno perdite per attrito, ovvero maggiore efficienza.
E) Ruote a settore
Una ruota a settori fa parte di qualsiasi tipo di ruota normale. Tali ruote vengono utilizzate nei casi in cui il collegamento non ha bisogno di ruotare di un giro completo e quindi è possibile risparmiare sulle sue dimensioni.
G) Ruote con denti circolari
Una trasmissione basata su ruote a denti circolari ha prestazioni di guida ancora più elevate rispetto a quelle elicoidali: elevata capacità di carico di innesto, elevata scorrevolezza e silenziosità di funzionamento. Tuttavia, hanno un’applicazione limitata a causa della ridotta efficienza e durata, a parità di condizioni; tali ruote sono notevolmente più difficili da produrre. La loro linea di denti è un cerchio di raggio, selezionato per determinati requisiti. Il contatto delle superfici dei denti avviene in un punto della linea di impegno, situato parallelamente agli assi delle ruote
Informazioni correlate.
- In contatto con 0
- Google+ 0
- OK 0
- Facebook 0