Quando il rapporto tra l'altezza dell'edificio e le sue dimensioni in pianta è elevato e vi è anche una grande conformità della base, sotto l'influenza del vento e dei carichi sismici l'edificio potrebbe ribaltarsi. Il calcolo del ribaltamento dell'edificio è molto importante poiché è direttamente correlato alla sicurezza strutturale dell'edificio nel suo complesso.
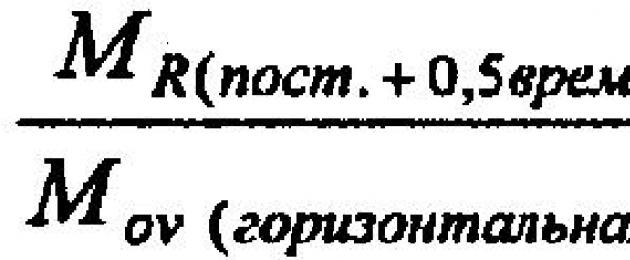
Le "Norme di costruzione e progettazione per strutture multipiano in cemento armato" (JZ 102-79) raccomandano che quando si calcola il ribaltamento di un edificio, attenersi al seguente rapporto tra il momento di tenuta M R e il momento di ribaltamento M ov:
"Regole per la costruzione e la progettazione di strutture in cemento armato a più piani" (JGJ 3-91) lo stesso calcolo viene eseguito in base alla condizione:

I "Codici edilizi per la progettazione sismica" (GB 50011-2001) prescrivono quando si combinano carichi che includono effetti sismici, i fattori di combinazione dovrebbero essere presi pari a 1,0. Per gli edifici a più piani con un rapporto altezza/larghezza superiore a 4, non sono ammesse pressioni negative sotto la base della fondazione, né aree con pressione zero. In altri edifici, l'area di pressione zero non dovrebbe superare il 15% dell'area della fondazione.
Secondo le "Istruzioni tecniche per la progettazione delle strutture degli edifici a molti piani" (JGJ 3-2002), per gli edifici con un rapporto altezza/larghezza superiore a 4, non dovrebbe esserci un'area di tensione zero alla base delle fondazioni ; per gli edifici con un rapporto inferiore a 4, l'area a stress zero è consentita non più del 15% dell'area della fondazione.
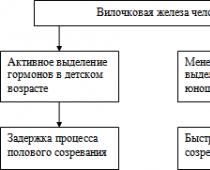
Schema di fondazione

1 - parte superiore; 2 - seminterrato; 3 - punto di resistenza al momento ribaltante di progetto; 4 - bordo inferiore della fondazione
- Momenti di inclinazione e trattenimento
Lascia che l'area di influenza del momento di ribaltamento sia l'area della sua base e la forza di influenza sia il carico sismico orizzontale o il carico del vento orizzontale:
dove M ov - momento ribaltante; H è l'altezza dell'edificio; C - profondità del seminterrato; V 0 - valori totali della forza orizzontale.
Il momento di tenuta viene calcolato nei punti marginali dall'effetto dei carichi totali:

dove M R - momento di tenuta; G - carichi totali (carichi permanenti, carichi di vento e neve con valore standard ridotto); B è la larghezza del seminterrato.
- Controllo del momento di tenuta e zona a tensione zero alla base della fondazione
Al calcolo del momento di tenuta

Assumiamo che le linee d'azione dei carichi totali passino per il centro della base dell'edificio (Fig. 2.1.4). Vengono determinati la distanza tra questa linea e il diagramma risultante delle tensioni di base e 0, la lunghezza della regione di tensione zero B-x, il rapporto tra la lunghezza della regione di tensione zero e la lunghezza della base (B - x) / B dalle formule:

Da qui otteniamo:

Dalle formule si ottiene il rapporto tra l'area della regione di tensioni zero e l'area della base per un momento di tenuta sicuro.
Zone di stress zero della fondazione e condizione di ribaltamento delle strutture
|
Rapporto del momento (MR/M ov) |
|||||
|
Percentuale zone a tensione zero (V-X)/V |
0 (tutte le sezioni in tensione) |
||||
Informazioni generali sulla stabilità della gru
Sostenibilità- è la capacità della gru di contrastare i momenti ribaltanti dovuti alla gravità del carico sollevato, al carico del vento, al peso proprio degli elementi della gru, ai carichi dinamici e alla pendenza.
La stabilità della gru è determinata dalle condizioni più sfavorevoli del suo funzionamento.
Un bordo di ribaltamento è una linea attorno alla quale può verificarsi una perdita di stabilità.
Quando si controlla la stabilità, viene determinato il coefficiente di stabilità della macchina e confrontato con il valore consentito.
M in - momento rigenerante
M opr - momento ribaltante.
Per le gru, il carico e la stabilità della macchina vengono determinati e confrontati con i valori consentiti durante il sollevamento del carico massimo, tenendo conto di tutte le influenze consentite (pendenza, vento, inerzia).
K y 1,15 (tenendo conto di tutti i carichi)
K y 1,4 (tenendo conto dei carichi principali)
Il calcolo della stabilità viene effettuato nei seguenti casi: quando la gru funziona con un carico (stabilità del carico), quando la gru non è in funzione (stabilità propria), quando il carico viene improvvisamente rimosso dalla gru (rottura del carico), quando la gru viene installata (smontata).
Stabilità del carico- la capacità della gru durante il funzionamento di resistere all'azione di tutti i carichi esterni che tendano a ribaltarla nella direzione del braccio.
Propria stabilità- la capacità della gru nello stato di riposo di resistere all'azione dei carichi, tenendo conto della pendenza del binario e della forza del vento, che tende a ribaltare la gru in direzione opposta al braccio.
Per caratterizzare la stabilità della gru vengono utilizzati i coefficienti del carico K gr e la propria stabilità K sob, determinati dalle regole e dalle formule.
La stabilità del carico viene controllata sia per lo sbalzo massimo che per quello minimo.
La stabilità delle gru con cambio di sbraccio viene controllata quando il braccio è allo sbraccio massimo.
La stabilità delle gru con modifica dell'installazione nello sbraccio è impostata sulla posizione in cui il braccio viene sollevato allo sbraccio minimo.
Le regole di Gosgortekhnadzor prescrivono, al termine dei lavori, di fissare le gru con dispositivi antifurto per le rotaie. In questo caso, la forza esercitata dal fissaggio alle rotaie non viene presa in considerazione nel calcolo della stabilità stessa. Va al margine di stabilità della gru.
1. Acquisire familiarità con le informazioni generali sulla stabilità delle macchine.
2. Determinare il momento di tenuta (ripristino) della gru.
3. Determinare i momenti ribaltanti:
Dal carico
Dalle forze di inerzia che si verificano durante il sollevamento di un carico
Dalla forza del vento che agisce sulla gru
Dalla forza del vento che agisce sul carico
Dalle forze di inerzia derivanti dal movimento di una gru con carico.
4. Determinare la stabilità della gru che opera su una piattaforma orizzontale con la partecipazione dei soli carichi principali.
5. Determinare il carico e la stabilità della gru
6. Trarre conclusioni.
7. Rispondi alle domande del test.
Metodo di calcolo:
Determinazione del momento di tenuta, Nm
M in \u003d G cr ((b + c) cos UN– h 1 peccato UN),
dove G cr è il peso della gru, N. (G = m g)
b è la distanza dall'asse di rotazione della gru al bordo di ribaltamento, m
c - distanza dall'asse di rotazione al baricentro della gru, m
h 1 - altezza del baricentro, m
α – angolo di inclinazione della gru, gradi
2. Determinazione dei momenti ribaltanti, Nm
Momento di carico:
M gr \u003d SOL gr (a - b),
dove G gr è il peso del carico di lavoro massimo, N
a è la distanza dal punto di sospensione all'asse di rotazione, m
M gr =
Il momento delle forze di inerzia derivanti dal sollevamento del carico:
M gr in \u003d G gr (a - b),
Dove V è la velocità di sollevamento (abbassamento) del carico, m/s
t è il momento del funzionamento instabile, s
M gr in =
Il momento dalla forza del vento che agisce:
alla spina: M in cr = F in cr N,
M in cr =
per il carico: M in gr \u003d F in gr H 1,
M in gr =
Dove F in è la forza del vento che agisce sulla gru (carico), N
F in \u003d p K a K p S,
p - pressione del vento, N / m 2
K a - coefficiente di resistenza aerodinamica
K a \u003d 1,4 - per un corpo reticolare (rubinetto)
K a \u003d 1.2 - per un corpo solido (carico)
H e H 1 - spalle del carico del vento sulla gru e carico, m
K p - coefficiente reticolare
K p \u003d 1 - per un corpo solido (carico)
K p \u003d 0,3 - 0,4 - per un corpo reticolare (rubinetto)
S - zona sottovento della gru (carico), m 2
F in kr \u003d p K a K p S kp \u003d
F in gr \u003d p K a K p S gr \u003d
F´ in kp = р´ K a K p S kp =
Il momento delle forze di inerzia che si verifica quando la gru si muove con un carico:
M gk \u003d h + h 1,
dove V 1 - la velocità di movimento della gru, m / s
t 1 - tempo di funzionamento instabile della gru, s
h 1 - altezza del baricentro della gru, m
h è la distanza dal piano di appoggio al punto di sospensione del carico, m
M gk =
Il momento delle forze centrifughe derivanti dalla rotazione della parte rotante. M c - negligenza.
3. Determiniamo la stabilità di una gru che opera su una piattaforma orizzontale con la partecipazione dei soli carichi principali:
K y1 = ≥ 1,4
K y 1 = ≥ 1,4
4. Determinare la stabilità del carico della gru:
≥ 1,15
M def \u003d M gr + M gr in + M gk + M in kr + M in gr =
K y 2 = ≥ 1,15
Condizione soddisfatta (non soddisfatta)
5. Determinare la nostra stabilità:
K y3 = ![]() ≥ 1,15
≥ 1,15
K y 3 = ≥ 1,15
Condizione soddisfatta (non soddisfatta)
Conclusione:(riflettere possibili modi per migliorare la stabilità della gru, soprattutto nel caso in cui non venga eseguito almeno un controllo).
Dati iniziali per il calcolo
| Opzioni | Numero di variante | ||||||||||||||
| Marca del rubinetto | KB-100.32 | KB-200.40 | KB-260.60 | KB-400,50 | KB-125.40 | KB-160.40 | KB-630.80 | KB-1 | KB-2 | KB-3 | KB-4 | KB-5 | KB-6 | KB-7 | KB-8 |
| Peso del carico, t | |||||||||||||||
| Peso della gru, t | |||||||||||||||
| Angolo di pendenza del sito, α ˚ | 1,5 | 1,5 | 1,5 | 1,5 | 1,5 | ||||||||||
| Altezza baricentro, h 1, m | |||||||||||||||
| Distanza dall'asse di rotazione della gru al bordo di ribaltamento, b, m | 1,2 | 1,5 | 1,65 | 1,9 | 1,2 | 1,3 | 1,2 | 1,2 | 1,4 | 1,7 | 1,8 | ||||
| Distanza dall'asse di rotazione al baricentro della gru, s, m | 0,08 | 0,1 | 0,13 | 0,15 | 0,09 | 0,1 | 0,15 | 0,05 | 0,07 | 0,07 | 0,09 | 0,12 | 0,14 | 0,15 | 0,15 |
| cm | 0,4 | 0,45 | 0,6 | 0,8 | 0,4 | 0,43 | 0,8 | 0,3 | 0,4 | 0,4 | 0,5 | 0,7 | 0,8 | 0,8 | 0,95 |
| Distanza dall'asse di rotazione della gru al punto di sospensione del carico, a, m | |||||||||||||||
| Spalle dei carichi del vento agenti: - sul carico, N 1, m | |||||||||||||||
| - sulla gru, H = H 2, m | |||||||||||||||
| Velocità di sollevamento, V, m/min | |||||||||||||||
| Tempo di funzionamento instabile, t = t 1 , s | |||||||||||||||
| Zona sottovento: - gru, S cr, m 2 | |||||||||||||||
| - carico, S gr, m 2 | |||||||||||||||
| Pressione del vento, p, Pa: - per lo schema "a" - p | |||||||||||||||
| - per lo schema "b" - р΄ | |||||||||||||||
| Distanza dalla piattaforma di appoggio ai blocchi di testa del braccio, h, m | 21 | ||||||||||||||
| Velocità di traslazione della gru, V 1 , m/min |
Metodo di calcolo
uno spostamento
La risultante delle forze verticali normative a livello della base della fondazione
ΣN II = 1463,56 kN (vedi 2.3)
Forza di taglio normativa F h \u003d 22 kN
Forza di tenuta di progetto F h c = f ΣN I o ΣS i ;
f0,3 - coefficiente di attrito del suolo
La somma degli sforzi calcolati ΣN I =γ n ·ΣN II ; γn=0,9.
ΣN I \u003d 0,9 1463,56 \u003d 1317,2 kN;
F h c \u003d 0,3 1317,2 \u003d 395,2 kN
Forza di taglio stimata F h = γ n F h ; F h \u003d 1,2 22 \u003d 26,4 kN
La stabilità è assicurata se F h F h con
Fh = 26,4< F h с = 395,2кН
b) ribaltamento
Momento ribaltante da carichi standard; dai carichi di progetto
M o = M II + F h · h f M o = γ n · M o ; γ n = 1,2;
M o \u003d 90 + 22 1,5 \u003d 12 kNm M o \u003d 1,2 123 \u003d 147,6 kNm
Momento di tenuta da carichi normativi
Umore = 0,5 v ΣN
Fango \u003d 0,5 3 1463,56 \u003d 2195,3 kNm
Momento di tenuta derivante dai carichi di progetto
Umore I \u003d 0,5v γ n ΣN II, γ n \u003d 0,9
Umore I \u003d 0,5 3 0,9 1463,56 \u003d 1975,8 kNm;
La stabilità al ribaltamento è assicurata se la condizione
M o< М уд I
M o \u003d 147,6< М уд I =1975,8 кНм
La stabilità del ribaltamento è garantita.
2.7. Calcolo della resistenza della struttura di fondazione
In connessione con l'uso di un tipico progetto di fondazione, viene eliminata la necessità di prove di resistenza.
Progettazione di fondazioni su pali.
La scelta dei disegni di pile e griglia.
Secondo lo schema in Fig. a pagina 11 dell'attività, i carichi e i momenti verticali e orizzontali vengono trasferiti dalla colonna alla fondazione. Pertanto, è consigliabile considerare che il numero minimo di pali sia 4 E. Quindi, in ogni palo, l'impatto del momento è insignificante. Il momento esterno è percepito da una coppia di forze. (vedi diagramma)
 ∆N M =
∆N M =
3d c6d (d è la dimensione della sezione trasversale del palo). Con carichi posteriori (vedi 1.3), è consigliabile prendere c = 3d, d = 0,35 m (Sezione minima dei pali pieni in cemento armato 20 × 20 cm)
Quindi le dimensioni della griglia in termini di a p \u003d b p \u003d 3d + d + 2 × 0,15 m
a p \u003d in p \u003d 3 0,35 + 0,35 + 2 0,15 \u003d 1,7 m
Per un inserimento affidabile dei pali in una griglia in cemento armato, il rinforzo è esposto alle estremità superiori dei pali in una sezione con una lunghezza di 0,4 m (vedi diagramma). Dov'è l'altezza della griglia consigliata h p \u003d 0,6 ÷ 0,8 m
h p ≈ 0,6 ÷ 0,8 m
I tipici pali in cemento armato con una sezione di 35 × 35 cm possono essere lunghi da 8 m (vedi pag. 10.11).
In alcuni casi, la loro lunghezza arriva fino a 16 m, se necessario è possibile utilizzare pali più lunghi con una grande sezione trasversale.
Nel nostro caso prendiamo una fondazione su pali approssimativa con le dimensioni mostrate nello schema di Fig. 3, dove possono essere applicati pali di fabbrica lunghi 8 ÷ 16 m.
Accettiamo pali lunghi 9 metri. Il volume della griglia in cemento armato
V p = a p × b h p
V p \u003d 1,7 × 1,7 × 0,6 \u003d 1,734 m 3
Volume dei pali in cemento armato
V sv \u003d 4 0,35 0,35 14 \u003d 6,86 m3
Peso della griglia F vp = γ cemento armato V p
Peso del palo F v c = γ cemento armato V sv
γ cemento armato 24 kN / m 3 - peso specifico del cemento armato
F vp = 24 1.734 = 41.616 kN
F v c \u003d 24 6,86 \u003d 164,64 kN
Determinazione della capacità portante del palo
a) a terra
Le estremità inferiori dei pali non poggiano sulla roccia, ma su rocce sedimentarie sciolte (vedi compito pag. 17), quindi i pali sono sospesi.
La capacità portante dei pali sospesi F d è determinata secondo SNiP (vedi pag. 14)
F d = γ c (γ c R R A +uΣγ c f f i h i)
Utilizziamo allora i pali battuti
γ s, γ s R , γ s f - i coefficienti di affidabilità possono essere uguali a 1.
R è la resistenza di progetto del terreno sotto l'estremità inferiore del palo (vedi pagina 37).
f i - resistenza di progetto del terreno dovuta all'attrito sulla superficie laterale del palo (vedi p.38).
A, u - l'area della sezione trasversale della pila e il suo perimetro.
A \u003d d 2; uu = 4d
A \u003d 0,35 × 0,35 \u003d 0,1225 m2
u \u003d 4 0,35 \u003d 1,4 m.
I valori di R e f i dovrebbero essere presi dalle tabelle p.37, 38 per terreni ad una certa profondità.
È conveniente dividere la lunghezza del palo in segmenti ℓ i 2 m, come mostrato nel diagramma e mostrare lì i valori R e f i, che vengono poi sostituiti nella formula di calcolo per il calcolo di F d

Il valore di R per il terreno del 2° strato a livello delle estremità inferiori dei pali.
Valori f i a livello della metà dei segmenti h i per terreni alle corrispondenti profondità z i
F d =1653 0,1225+1,4(1,9 30+2 38+1,4 30,4+1,4 32,1+1,3 33,225+1,0 33,55+1,0 34,48+1,0 35,28+1,0 36,08+1,0 36,88+1,0 37,68)= 871,2 kN
stabilità dinamica chiamata la capacità della nave di resistere, senza capovolgersi, agli effetti dinamici dei momenti esterni.
Fino ad ora, quando si consideravano i problemi di stabilità, si presumeva che il momento sbandante agisse sulla nave in modo statico, cioè il momento sbandante m cr era pari al momento ripristinante m Θ . Potrebbe essere:
1) o con un aumento di m cr così lento che in ogni momento si realizza l'uguaglianza m cr = m Θ;
2) sia nella posizione della nave, quando è trascorso molto tempo dal momento m kr della domanda.
Infatti, in molti casi, il momento sbandante viene applicato dinamicamente alla nave (onda che rotola, vento squallido, ecc.). In questi casi il momento sbandante aumenta più velocemente del momento ripristinante e non viene rispettata l'uguaglianza tra i momenti. Di conseguenza, il processo di inclinazione della nave viene accelerato.
Viene chiamato l'angolo di sbandamento maggiore che la nave raggiunge quando si inclina con accelerazione angolo dinamico rotolo Θ din. Il valore di Θ dyn supera significativamente il valore dell'angolo statico di sbandamento Θ c (a m kr.din = m kr.st). È possibile il caso in cui, con un'accelerazione angolare significativa, il valore di Θ dyn risulta essere così grande da ribaltare la nave (con un'applicazione statica non pericolosa per la nave, pari in grandezza a m kr).
Nella teoria navale, quando si studiano le inclinazioni dinamiche, si assume solitamente che l'acqua e l'aria non resistano a tale inclinazione; questa ipotesi porta ad un errore nella direzione sicura.
3.11.1 Inclinazione della nave sotto l'azione dinamica del momento sbandante. Supponiamo che un momento m kr sia applicato dinamicamente a una nave avente Θ = 0, che poi continua ad agire staticamente, senza cambiare in grandezza con una variazione dell'angolo di sbandamento Θ (Fig. 3.25).
Nella sezione di inclinazione della nave da Θ = 0 a Θ st, quando m cr > m Θ, si accumula energia cinetica a causa dell'eccessivo lavoro del momento sbandante, la velocità angolare aumenta dΘ / dt, l'accelerazione angolare d 2 Θ / dt 2 è positivo, ma il suo valore diminuisce a causa del contrasto del momento ripristinante. A Θ = Θ st, quando m kr = m Θ , la velocità di inclinazione e l'energia cinetica della nave raggiungono i loro valori massimi e l'accelerazione è zero.
Nel punto di inclinazione della nave da Θ st a Θ dyn, quando m kr< m Θ , накопленная ранее кинетическая энергия погашается противоположной по знаку избыточной работой восстанавливающего момента, скорость наклонения уменьшается, ускорение отрицательное и с нарастанием угла Θ величина его растет. Наклонение судна прекращается в точке Θ дин, в которой наблюдается равенство работ кренящего А кр и восстанавливающего моментов А Θ . Эти работы можно записать как

Figura 3.25 - Considerare le inclinazioni dinamiche
La posizione della nave con Θ = Θ dyn non è una posizione di equilibrio. Sotto l'azione di un momento di ripristino in eccesso, la nave inizierà a raddrizzarsi (fino a Θ = Θst accelerata, quindi rallentata) e raggiungerà la posizione Θ = 0 (in assenza di forze di resistenza) con velocità angolare nulla. Successivamente, il fenomeno si ripete: la nave oscillerà attorno alla posizione Θ = Θ st. In assenza di resistenza a queste oscillazioni da parte dell’acqua e dell’aria, potrebbero continuare indefinitamente. Infatti, nel caso in esame, la nave compie oscillazioni smorzate e, di conseguenza, si ferma nella posizione di equilibrio con un angolo Θ st.
3.11.2 Determinazione dell'angolo dinamico dello sbandamento della nave. Stock di stabilità dinamica. Il valore dell'angolo Θ dyn quando agisce sulla nave il momento m kr di dato valore si può ricavare utilizzando l'uguaglianza dei lavori A cr = A Θ con un'inclinazione Θ = Θ dyn
(m cr – m Θ) dΘ = 0,
oppure (m cr – m Θ) dΘ + (m cr – m Θ) dΘ = 0
oppure (m cr – m Θ) dΘ = (m Θ – m cr) dΘ,
 dove l'integrale (m cr - m Θ) dΘ = δА cr esprime il lavoro in eccesso del momento sbandante nella sezione di inclinazione della nave da Θ = 0 a Θ st, e l'integrale (m Θ - m cr) dΘ = δА Θ - il lavoro in eccesso del momento ripristinante sulla sezione di inclinazione della nave da Θ st a Θ dyn.
dove l'integrale (m cr - m Θ) dΘ = δА cr esprime il lavoro in eccesso del momento sbandante nella sezione di inclinazione della nave da Θ = 0 a Θ st, e l'integrale (m Θ - m cr) dΘ = δА Θ - il lavoro in eccesso del momento ripristinante sulla sezione di inclinazione della nave da Θ st a Θ dyn.
Figura 3.26 - Determinare gli angoli di rollio dinamico della nave.
Nella fig. 3.26 il lavoro del momento sbandante A cr è un rettangolo OKVD, e il lavoro del momento ripristinante A Θ è un trapezio curvilineo OAMBD. Le aree ombreggiate 1 (OKA) e 2 (AMV) corrispondono al lavoro in eccesso dello sbandamento δА cr e ai momenti di ripristino δА Θ .
Pertanto l’angolo Θ dyn può essere determinato graficamente dal diagramma di stabilità statica a partire dalla condizione di uguaglianza in termini di area 1 e 2.
Come si può vedere dalla figura. 3.26, con un tipico diagramma di stabilità statica Θ dyn » 2 Θ st.
Da quanto sopra è ovvio che il lavoro del momento ripristinante può servire come misura della stabilità dinamica della nave. L'area sul DSO sotto la curva m Θ (Θ) ОАМВN (in Fig. 3.26), che caratterizza il lavoro A Θ, è chiamata margine di stabilità dinamica nave (ZDO). Maggiore è questa area, maggiore è la stabilità dinamica della nave durante la navigazione in linea retta. Se si considera la Figura 6.3, diventa ovvio che minore è l'altezza metacentrica del vaso, minore è non solo il margine di stabilità statica, ma anche quello dinamico. Quando una nave naviga con un angolo di sbandamento statico Θ st.1, il margine di stabilità dinamica diminuisce e nella Figura 3.26 è determinato solo dall'area AMB compresa tra la curva m Θ (Θ) e m kr (Θ).
3.11.3 Limiti di stabilità dinamica della nave. Questi limiti sono:
Momento massimo di sbandamento m kr.dyn. max , la cui applicazione dinamica non ha ancora causato il capovolgimento della nave ( momento di ribaltamento);
Angolo di inclinazione dinamico massimo Θ dyn. massimo
Per trovare i valori di m kr.dyn. max e Θ din. max, è possibile utilizzare il diagramma di stabilità statica (Fig. 6.11). All'aumentare di m cr. l'angolo Θ dyn aumenta. Per alcuni m cr. = m cr.din. max , che corrisponde al caso limite di uguaglianza delle aree 1 e 2, quando può ancora essere assicurata l'uguaglianza del lavoro in eccesso dei momenti contrastanti e sbandanti, l'angolo Θ dyn = Θ dyn. massimo Pertanto, Θ din. max è determinato dal punto di intersezione del grafico m kr (Θ), corrispondente a m kr.din. max , con il ramo discendente del DSO.
Se, con l'applicazione dinamica del momento di sbandamento, il suo valore m kr > m kr.din. max , allora il lavoro in eccesso del momento sbandante non potrà più essere completamente estinto dal lavoro in eccesso del momento ripristinante, e la nave si capovolgerà. Con un'applicazione statica della stessa grandezza del momento m kr, la sicurezza della navigazione della nave è garantita se solo m kr £ m kr.st. massimo Dalla fig. 3.26 si può vedere che m kr.din. massimo< m кр.ст. max .
Pertanto, la stabilità dinamica della nave sotto l'influenza di m kr di un dato valore è garantita se l'angolo dinamico di sbandamento non supera il valore al quale il lavoro del momento sbandante può ancora essere compensato dal lavoro del momento ripristinante .
3.11.4 Diagramma della stabilità dinamica della nave. Per risolvere problemi di stabilità dinamica, è conveniente da usare diagramma di stabilità dinamica(DDO), che determina il lavoro del momento ripristinante A Θ per ciascun valore dell'angolo Θ (Fig. 3.27).
Come è noto, l'azione del momento ripristinante sull'angolo di sbandamento può essere rappresentata dall'espressione
E Θ = mΘ dΘ,

Figura 3.27 - Diagramma di stabilità dinamica
dove la funzione m Θ (Θ) è un diagramma di stabilità statica (DSS).
Pertanto, DDO è una curva integrale rispetto a DSO. Come ogni curva integrale, ha le seguenti proprietà:
1) ciascuna delle sue ordinate esprime l'area sotto il DSO lungo tale ordinata;
2) il punto di flesso (punto B) corrisponde al massimo DSO;
3) il massimo della curva integrale (punto C) corrisponde all'angolo di tramonto del DSO;
4) l'ordinata DDO in Θ = Θ zak determina il margine di stabilità dinamica della nave nella posizione di equilibrio prodiero;
5) la tangente dell'angolo della tangente tracciata al diagramma di stabilità dinamica determina l'ordinata del diagramma di stabilità statica a parità di angolo di sbandamento.
Poiché m Θ = γV l Θ , l'espressione del lavoro del momento ripristinante può essere scritta come
A Θ = m Θ dΘ = γV l Θ dΘ = γV l Θ dΘ = γV l dyn,
Stabilità dinamica della trazione elettrica - è la capacità del sistema di azionamento elettrico di ripristinare l'equilibrio in caso di brusco cambiamento nella sua modalità di funzionamento.
Un motore asincrono con un disturbo che cambia lentamente può essere caricato gradualmente fino al valore del momento ribaltante.
Ma con un rapido cambiamento di perturbazione momento dinamico , algebricamente prendere forma Con coppia elettromagnetica del motore.
A causa della somma algebrica della coppia dinamica con la coppia elettromagnetica, il sistema di azionamento sviluppa una coppia superiore alla coppia critica (massima) del motore con una diminuzione della velocità e riduce la coppia sviluppata dall'azionamento, ad un valore inferiore a quello critico, con aumento della velocità del sistema di azionamento elettrico.
Pertanto, il rapporto cessa di essere un criterio per il funzionamento stabile dell'azionamento elettrico. L'inerzia e l'energia immagazzinata dal sistema hanno una maggiore influenza sul funzionamento dell'azionamento.
Caduta di tensione di rete
La caduta di tensione di rete è il cambiamento improvviso più caratteristico della modalità operativa dell'azionamento elettrico. Può verificarsi una caduta di tensione nella rete della nave: quando si avviano motori potenti o si spegne uno dei generatori paralleli.
Un motore che funziona con una coppia statica sulla caratteristica meccanica naturale nel punto "A" (Fig. 12-3a.), Quando la tensione diminuisce alla stessa velocità, si sposterà al punto "B" sulla caratteristica artificiale.
Sotto l'azione del momento dinamico risultante, il cui valore è determinato dalla lunghezza del segmento "A - B", il motore verrà frenato secondo l'equazione del moto fino all'arresto completo, punto "D" sull'artificiale caratteristica (IMC):
![]() (12-3)
(12-3)
Usando i rapporti: e otteniamo:
![]() (12-4)
(12-4)
Influenza del valore della tensione di rete sulla stabilità della trazione elettrica. Stallo del motore
Consideriamo l'influenza della tensione di rete sulla stabilità dell'azionamento elettrico CA.
Con profondi cali della tensione di rete, il funzionamento del motore asincrono diventa instabile: il motore potrebbe ribaltarsi.
Sotto il rollover comprende la modalità di emergenza motore asincrono; in cui lui si ferma o fa retromarcia. La condizione di rollover è:
M"< М ,
Dove M"- momento critico del motore a bassa tensione;
M- momento statico del meccanismo.
In altre parole, Il ribaltamento si verificherà se il momento critico del motore diventa inferiore al momento statico del meccanismo .
Ricordiamo che il momento critico di un motore a induzione è proporzionale al quadrato della tensione:
M= con, (12-5)
Dove U E F- rispettivamente, la tensione e la frequenza della rete di alimentazione.
Ne consegue che al calo di tensione consentito dalle Regole del Registro
rete pari al 15% ( U" = 0,85U), sarà il nuovo valore ridotto del momento critico
M"\u003d M \u003d (0,85) M \u003d 0,7225 M ≈ 0,7 M. (12-6)
Le conseguenze del ribaltamento dipendono dalla natura del momento statico del meccanismo, vale a dire:
1. con una coppia statica reattiva, il motore si ferma e va in modalità standby sotto corrente (pompe, ventilatori Fig. 12.3a);
2. con un momento statico attivo, il motore prima si ferma, poi inverte la marcia e, sotto l'influenza del peso del carico, inizia ad accelerare con velocità crescente nella direzione della discesa (meccanismi di sollevamento e dispositivi di ancoraggio Fig. 12.3 B).

Fig.12.3a 12.3b
Riso. 12.3. Processi transitori in caso di ribaltamento del motore: a - con momento reattivo statico (pompa, ventola); b - con momento statico attivo (verricello, verricello).
Considera il processo di ribaltamento del motore con momento reattivo statico meccanismo esecutivo (Fig.12.3a). Prima del calo di tensione, il motore funziona secondo la caratteristica meccanica naturale (EMH), nel punto "A" con una velocità costante ω.
Con un calo di tensione il motore si sposta dal punto "A" della caratteristica meccanica naturale (EMC) al punto "B" della caratteristica meccanica artificiale (IMC) alla stessa velocità ω. velocità del motorecorponon riesce a cambiare a causa dell'inerzia del movimento parti dell'azionamento, quindi nel punto "B" la velocità è la stessa del punto "A".
Poiché nel punto "B" la coppia del motore M inferiore al momento del meccanismo M, il motore inizia a decelerare fino al punto "C". A questo punto, la coppia critica (massima) del motore M "<M, quindi il motore continuerà a decelerare fino al punto D.
Nel punto D il motore si fermerà e verrà energizzato con un momento di cortocircuito M fino a quelli fino all'attivazione della protezione termica.
Considera il processo di ribaltamento del motore con un momento statico attivo dell’esecutivo meccanismo . I meccanismi con un momento statico attivo (verricelli da carico, verricelli) si invertono quando si ribaltano sotto l'azione del peso del carico o dell'ancora (Fig. 12.3b).
In caso di interruzione di tensione della rete della nave, il processo transitorio procede prima come nel caso di un momento statico reattivo (Fig. 12.3a). Tuttavia, dopo che il motore si è spostato al punto "D", motore no fermare , e inverte immediatamente e accelera dentro direzione inversa (punti F, F, F).
Perché il segno di coppia elettromagnetica del motorenon da cambiato , cioè. diretto nella direzione del carico il motore entrerà in modalità di frenata in discesa E proverò a rallentare abbassando il carico.
Tuttavia, allo stesso tempo, la velocità di abbassamento del carico aumenterà continuamente . Questo è spiegato da entità della coppia elettromagnetica frenante del motore mentre ti sposti dal punto F al punto F e poi al punto F in continua diminuzione (M<M<M) UN grandezzail momento statico attivo non cambia e diretto nella direzione della discesa del carico.
Se il motore elettrico non viene disconnesso tempestivamente dalla rete e non è frenato da un freno meccanico, questa modalità porterà ad un incidente.
- In contatto con 0
- Google+ 0
- OK 0
- Facebook 0